
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 16171819202122 ... 43 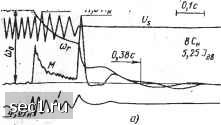  Рис. 35. Осциллограммы конденсаторно-динамического торможения двигателя А02-31-4 при подключении выпрямителя до окончания конденсаторного торможения напрялсения полупериод возникает релсим магнитного тормолсе-ния. "Величина тормозного момента определяется величинами магнитного потока машины и сопротивления цепи статора в проводящем направлении. Если подключение выпрямителя происходит в конце конденсаторного тормолсения при скорости вращения, мало отличающейся от со™.!!, то после первого замыкания цепи статора скорость привода значительно снижается, магнитное поле двигателя полностью гасится и последующий режим динамического торможения начинается при нулевых электромагнитных начальных условиях (рис. 35, а). Если выпрямитель подключается при скорости вращения значительно большей curK.ii, то из-за замыкания только двух фаз обмотки, статора самовозбуждение машины поддерживается однофазным колебательным контуром. В последующий непроводящий полупериод режим конденсаторного торможения восстанавливается, а в следующие проводящие полупериоды происходят повторные замыкания статорной цепи, но с уменьшающимися пиками тормозных моментов. Этот процесс прекращается только после того как в один из проводящих полупериодов происходит окончательный срыв самовозбуждения машины без последующего его восстановления. В этом случае (рис. 35, б) тоже наблюдается трехэтапное торможение: конденсаторное, магнитное и динамическое. Длительность существования режим.а магнитного торможения и его эффективность определяются величинами электромагнитной и кинетической энергии в момент подключения выпрямителя, а также сопротивлением его цепи. Поэтому подача "62 "л. - . выпрямленного тока сразу же после отключения двигателя от сети создает режим повторных замыканий с небольшими пика тормозного момента (рис. 35, в). При отсутствии в цепи выпрямителя дополнительного резистора пики тормозных мо- jjeHTOB могут превысить номинальный момент двигателя в 10 15 раз, что при определенных условиях представляет опасность для привода. Одновременно с этим магнитное торможение прекращается при относительно высокой скорости привода, что снижает общий тормозной эффект, обеспечиваемый КДТ. Введение добавочного резистрра в цепь выпрямленного тока уменьшает пики тормозных моментов и несколько повышает эффективность торможения за счет увеличения длительности режима повторных замыканий. При питании тормозного устройства напряжением от генератора постоянного тока физическая картина процесса КДТ изменяется мало. В этом случае при подключении источника остояиного тока с малым сопротивлением происходит замыка-ие цепи статора двигателя на источник и из-за малого внут-еннего сопротивления источника возникает большой пик тор-озного момента, а режим конденсаторного торможения пре-ащается. Поэтому подача постоянного тока должна [рОИЗВОДИТЬСЯ только при скорости привода, близкой к СОгк.н. При введении в цепь постоянного тока большого • добавочногс сопротивления возможно сохранение режима повторных замыканий и после подачи постоянного тока. Таким образом, только в одном частном случае КДТ можно> рассматривать как простую сумму последовательно действующих режимов-компонентов (конденсаторного и динамического). В общем же случае КДТ является сложным режимом, сопровождающимся специфическими явлениями, протекающими в , существенно нелинейной электромеханической системе и зависящими от схемы и параметров тормозного устройства. Анализ; режима в общем случае нельзя проводить по статическим характеристикам и применять принцип наложения. Статические характеристики КДТ, в тех случаях когда они существуют, не могут быть получены путем суммирования статических характеристик режимов-крмпонентов. Опасность получения больших ударных тормозных моментов при КДТ, способных привести к быстрому износу механической части привода, требует особого-внимания при построении и выборе схем КДТ и параметров-тормозных устройств. Конструирование схем КДТ может производится по одному из следующих трех принципов. Первый принцип характеризуется подачей выпрямленного (или постоянного) тока после прекращения конденсаторного-торможения и последовательным действием тормозных режимов- конденсаторного и динамического. При этом имеют место обычные коммутационные электромагнитные переходные про- цессы. Статическая характеристика определяется суммой статических характеристик режимов-компонентов. Второй принцип характеризуется перекрытием режимов прц -подаче выпрямленного тока до прекращения конденсаторного торможения. Возникающий при этом режим однократного ила многократного магнитного торможения оказывает существенное влияние на тормозной процесс, который поэтому принципиально не может характеризоваться суммированием действия конденсаторного и динамического торможения. Статическая характеристика режима также не определяется суммой статических характеристик режимов-компонентов. Третий принцип характеризуется полным совмещением конденсаторного и динамического торможения при подаче выпрямленного тока сразу после отключения двигателя , от сети. В этом случае процесс торможения состоит фактически только из двух режимов: многократного магнитного и динамического торможений. Конденсаторы периодически восстанавливают магнитный поток машины. Статическая тормозная характеристика на первой ступени торможения может существовать только при большом добавочном сопротивлении в цепи выпрямленного тока. Возможность построения тормозного устройства по одному из сформулированных выше принципом реализации КДТ, как и характер процесса торможения, зависит от типа и способа подключения конденсаторов,- а также источника выпрямленного тока. При конденсаторно-динамическом торможении применяют те же типы конденсаторов, что и при других способах конденсаторного торможения: бумалшые, металлобумажные и электролитические. Сохраняются и два способа их подключения: глухое и после отключения двигателя от сети. Для электролитических конденсаторов возможен только второй способ. Источниками возбуждающего тока могут быть одно- и двух-полупериодные выпрямители, а также генератор постоянного тока. Применение однополупериодного выпрямленного тока из-за малой эффективности торможения целесообразно только в отдельных случаях. Генераторы постоянного тока в приводах станков не применяют, поэтому наиболее типичным является использование двухполупериодных выпрямителей. ОСНОВНЫЕ СХЕМЫ ТОРМОЗНЫХ УСТРОЙСТВ Основной схемой реализации КДТ является схема с глухим подключением конденсаторов (см. рис. 33), условно называемая схемой КДТ-Г. Отсутствие добавочных резисторов в цепи выпрямленного тока позволяет получить максимальное значение последнего при данной мощности источника. В зависимости от схемы управления тормозной режим может осуществляться по одному из двух сформулированных выше принципов. 0 ... 16171819202122 ... 43 |