
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 17181920212223 ... 43 36. Схема КДТ-1 и це-Р** правления для реали-иИ торможения по пер-. ц второму принципам 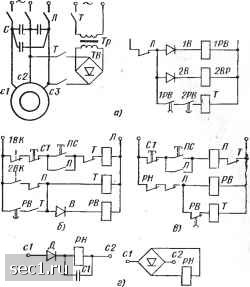 Для осуществления конденсаторно - динамического торможения по лервому принципу реко-е1дуются схемы управления, приведенные на рис. 36, а-б. -Для инерционных приводов любой мощности с мало изменяющимся в процессе торможения моментом нагрузки управление подачей выпрямленного тока может производиться в функции времени (рис. 36, а). Электромагнитное (или любое другое) реле времени 1РВ настраивается так, чтобы контактор Т включался после окончания конденсаторного торможения при скорости привода, равной сот.н. Реле времени 2РВ отключает контактор Т после остановки привода. Для повышения точности остановки при меняющемся статическом моменте лодачу выпрямленного тока лучше производить ь функции пути с помощью конечных выключателей 1ВК и 2ВК (рис. 36, б), кратковременно переключающих свои контакты, а отключать в функции времени. Подача выпрямленного тока в функции напряжения на зажимах статора (рис. 36, в) позволяет поддерживать оптимальную настройку схемы при любых колебаниях нагрузки и инерционных масс. Реле напряжения РН (рис. 36, г) с параллельно включенным конденсатором включается на зажимы статора Через диод Д. Для повышения точности работы реле РН лучше применять двухполупериодный выпрямитель без конденсатора. Для еще большей точности реле. РН можно включать так же, как показано на схеме рис. 32. Процесс торможения по схемам КДТ-1 происходит плавно, без ударов и вибраций (см. рис. 34, б). Реализация конденсаторно-динамического торможения, по . Второму принципу с частичным перекрытием режимов возможно за счет соответствующей настройки реле времени или реле Напряжения. Такие схемы условно называют схемами КДТ-2, используют для эффективного торможения инерционных приводов. I •3 Зак. 1589 65  Т СТ гпс Д , "-1>Т Рис. 37. Схемы реализации конденсаторно-динамического торможения tic третьему принципу: с - схема КДТ-3; б - схема" КДТ-4; е - схема цепей управления Введение в цепь выпрямленного тока добавочного резистора позволяет-реализовать третий принцип построения КДТ с полным совмещением режимов. Схему такого торможения (рис. 37, а) условно называют схемой КДТ-З-. Схема управления в этом случае отличается исключительной простотой, поскольку включение контактора Т (рис. 37, в), подающего выпрямленный ток, производится размыкающим контактом контактора Л сразу после его отключения. Схема имеет минимальное число, аппаратов, а если не требуется отключения выпрямителя после остановки двигателя, то исключение реле времени еще более повышает ее надежность и простоту. Тормозной процесс в схемах КДТ-3 протекает так, как показано на осциллограммах рис. 35, б, в, и сопровождается значительными пиками тормозного момента одного знака. Эту схему можно применять для эффективного торможения электроприводов любой мощности ir любых параметров. Схема КДТ-4 (рис. 37, б) позволяет реализовать тормозной процесс также по третьему принципу с полным перекрытием режимов. Подключение конденсаторов вместе с источником выпрямленного тока позволяет выбирать их на меньшее номинальное напряжение, что уменьшает размеры и стоимость тормозного устройства. Тормозной момент, как и в схеме КДТ-3, содержит переменную составляющую, не меняющую общего знака момента. " . Увеличение сопротивления резистора в схемах КДТ-3 и КДТ-4 уменьшает пики ударных моментов магнитного тормо-лсения и делает торможение более плавным. Соответственно при сохранении величины выпрямленного тока увеличиваются потери энергии. Оптимальная эффективность торможения достигается в схеме КДТ-4 при относительно большей величине сопротивления и соответственно меньших пиках момента, чем в схеме КДТ-3. Схему КДТ-4 можно рекомендовать для эффективного торможения инерционных приводов при необходимости ограничения величины ударных тормозных моментов-66 в схеме КДТ-4 возможно использование электролитических онденсаторов, что резко снижает массу, объем и стоимость как лока конденсаторов, так и всего тормозного устройства. Особенности применения в тормозных устройствах полярных электролитических конденсаторов рассмотрены ниже, там же описа-ц особенности тормозного процесса в такой схеме, которую в этом случае условно называют схемой КДТ-5. Здесь следует только отметить, что возможными ограничениями для применения схемы КДТ-5 могут быть частота торможений, определяющая степень нагрева электролитических конденсаторов, и не-табильность свойств этих конденсаторов. Во всех приведеных схемах управления предусматривается механическая блокировка.контакторов Л и Т. Если по условиям эксплуатации время, подачи выпрямленного тока в обмотки двигателя не ограничивается, то из, схем управления можно исключить реле времени, отключающие тормозной контактор Т после остановки двигателя. Для двигателей малой мощности в схемах КДТ-3 вместо тормозного контактора Т возможно использовать размыкающие блок-контакты линейного контактора. Для сравнительной оценки основных схем КДТ в табл. 2 приведены некоторые усредненные данные, полученные экспериментально при испытаниях нескольких четырехполюсных дви- гателей серии А2 мощностью 1,5-4 кВт. Во всех схемах величина симметрично подключаемой к каждой фазе емкости со-ставляла. 8 Сн, а величина выпрямленного тока 1,5 /ц. Суммарный приведенный момент инерции больше Четырехкрат- • жой величины момента инерции ротора двигателя, а статический момент меньше 0,1 номинального. Величины пути и времени торможения получены как средние из рЯда измерений. За базовые величины приняты показатели для схемы КДТ-3 с конденсаторами КМ2-0,5 как наиболее просто реализуемой и достаточно эффективной. Для сопоставления приведены данные .противотокового и динамического торможения. Из данных табл. 2 следует, что все схемы, кроме КДТ-1, «.беспечивают эффективность торможения, равную либо близкую "эффективности противотокового торможения. Отсутствие Переходных знакопеременных и пиковых пульсирующих моментов при торможении по схеме КДТ-1 сообщает ей свойства высокой точности, повторимости и плавности, в несколько раз Превышающие аналогичные показатели для других схем. Очень важно правильно выбирать схему для наиболее рационального решения поставленной задачи. Например, применение схемы, КДТ-4 вместо- схемы КДТ-3 уменьшает объем и стоимость кон-•Денсаторов 2 раза. " Важным техническим показателем качества схемной реали-зации является надежность тормозного устройства. Поскольку, .абсолютные величины интенсивностей отказов элементов тор-ai03Horo устройства значительно изменяются в зависимости от ii. 3*. 67 0 ... 17181920212223 ... 43 |