
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 19202122232425 ... 43 рис. 38. Графики для определения углового пути фЛ (1, 2, 3) и времени <Д (4, g 6) конденсаторно-дина-,,ического торможения при различных величинах емкости С" подключенных конденсаторов в зависимо-(-ти от величины возбуждв-(ощего тока (все величины даны Б относительных единицах): I. б -при с* =8; 2, 5 - при C«=4; 3. 4 -при С*=0 где /s-суммарный приведенный момент инерции данного привода, о кг-м; - номинальный момент двигателя, Н-м; /н, /он - ток двигателя соответст» венно номинальный и номинальный холостого хода, А. Статический момент принимают равным нулю. Штриховой линией на рис. 38 показаны кривые для чистого динамического.-торможения (Сд=0). В других случаях расчеты нужно выполнять с учетом пере* ходных моментов, чтовозможно упри использовании ЭВМ. Только при торможении инерционных приводов по схеме КДТ-1 расчеты можно производить по статическим характеристикал. конденсаторного и динамического торможения. В табл. 3 прИ .-веден! краткие рекомендации по применению основных схем КДТ. 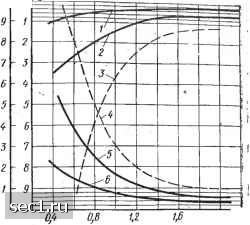 СХЕМЫ ТОРМОЗНЫХ УСТРОЙСТВ КДТ Наряду с основной группой схем КДТ на практике применяют большое число схем, решающих отдельны частные зада* чи. Некоторые из наиболее удачных целесообразно рассмотреть. Динамическое торможение при питании однополупериод-ным выпрямленным током малоэффективно из-за наличия гармонической составляющей тока основной частоты, из-за чего двигатель развивает в зоне высоких скоростей двигатель ный момент и при малой нагрузке вообще не останавливается. Вместе с тем схема выпрямления привлекает простотой реализации, особенно если применяют управляемый диод. Применение конденсаторов делает возможным торможение и в этом случае при любом статическом моменте. Схема КДТ-6 (рис. 39) с однополупериодным выпрямлением тока принципиально допускает реализацию всех трех принци- ТаблицаЗ Рекомендации по применению оснобнызс схем КДТ
I т I J 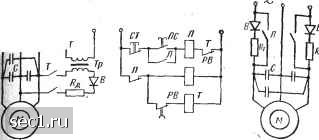 Рис. 39. Схема КДТ-6 с однополупериодным выпрямителем- Рис. 40. Схема КДТ-7 ЛОВ построения КДТ. Однако наиболее рациональным следует в данном случае считать третий. Это соответственно отраженО( в приведенной схеме цепей управления. Для двигателей небольшой мощности оказаться рациональным увеличение сопротивления резистора и отказ от трансформатора, что еще-больше упрощает тормозное устройство и снижает пийи момента. Разработанная в СКВ ЗШ и ЗС схема, условно, называемая далее КДТ-7 .(рис. 40), предназначена для торможения малоинерционных приводов малой мощности с большим числом включений, когда длительность управляющего импульса соизмерима со временем срабатывания аппаратуры управления а временем торможения [11]. Отключение контактора Л переводит двигатель в тормозной режим, а включение - сразу же. в; двигательный.- Схема построена по третьему принципу с полным совмещением режимов компонентов. Значительная величина сопротивления добавочных резисторов не только ограничивает повторяющиеся пики моментов, но и существенна снижает эффективность торможения. Повышение эффективности схемы может быть достигнуто при включении вентилей с перекрещиванием фаз. Однако в этом случае появляются значитель- 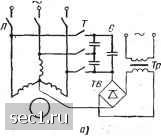 .т т л rif- \j в Рис. 41. Схемы КДТ-8 (а) и КДТ-9 (6) 0 ... 19202122232425 ... 43 |