
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 35363738394041 ... 43 рис. 62. , Блок-схема устройства (а) и осциллограммы (б, в) вклю-•чения конденсаторов три тиристорном управлении *• БУ  1г Ил  новившийся режим без возникновения переходных составляющих тока и напряжения. Блоки, контроля напряжения БК (рис. 62, а) снимают запирающий сигнал с блока управления БУ в момент, когда контролируемое напряжение на тиристорах равно нулю. Блок управления открывается на короткое время, необходимое для Передачи сигнала от высокочастотного генератора импульсов ГИ выходному устройству ВУ, включающему тиристоры. Блок управления при наличии команды на включение конденсаторов от командного устройства КУ и разрешения контроля подает Сигнал от генератора импульсов на выходное устройство, которое включает тиристоры. Осциллограмма на рис. 62, б иллюстрирует процесс включения незаряженного конденсатора,-когда ток через него начинает протекать в момент прохождения через нуль синусоиды напряжения сети. Осциллограмма на рис. 62, в описывает процесс включения заряженного кондеяса-тора, когда ток начинает проходить при равенстве нулю раз-ности мгновенных значений напряжения сети и напряжения на конденсаторе. Осциллограммы сняты при управлении тиристорами с помощью устройства, разработанного на основе приведенной блок-схемы [19]. Применение такого устройства управления тиристорами позволяет использовать торможение с подключением конденсаторов по любой-из рассмотренных ранее схем, но с встречно-параллельно включенными коммутирующими тиристорами вместо контакторов. Наиболее эффективным способом комбинированного торможения является конденсаторно-динамическое (КДТ). При применении этого способа для асинхронных электроприводов с тиристорным управлением подключать конденсаторы можно Симметрично или несимметрично, глухо или после отключения ют сети, по схемам, аналогичным контакторным. Характер про- текания тормозного процесса зависит от принципа реализации КДТ. Если управление режимом КДТ выполняется по первому принципу, то процесс конденсаторного торможения никаких особенностей не имеет, а следующий за ним этап динамического торможения начинается при нулевых начальных усло-Ёиях. При реализации КДТ по второму и третьему принципам тиристорное управление имеет некоторые особенности, связанные с малЪш активным сопротивлением цепи выпрямленного-тока и дискретностью его формы. , Режим конденсаторного торможения при закрытых выпрямляющих тиристорах проходит так, как и при контактном управлении. В противоположность этому режим динамического торможения, даже если он начинается после полного окончания конденсаторного, отличается тем, что с началом непр-ово-дящего полупериода ток продолжает проходить через выпрямляющий тиристор из-за разряда подключ;енных к обмоткам двигателя конденсаторов. Малое сопротивление цепи определяет колебательный характер разряда с частотой и амплитудой тока,, зависящей от величины емкости кондецсаторов и скорости двигателя. Увеличение переменной составляющей тока приводит к образованию соответственно двигательной составляющей момента, что определяет знакопеременный характер развиваемого двигателем момента на последнем участке торможения. Знакопеременный момент уменьшает эффективность торможения и обусловливает такой же знакопеременный характер изменения ускорения в процессе торможения малоинерционных приводов. Если выпрямляющий тиристор оказывается при скорости вращения, близкой к со-к. н, когда магнитный поток еще существует, то возникает переходный процесс, аналогичный процессу начала динамического торможения и ненулевыми электромагнитными начальными условиями. Из-за большой величины потока пик начального переходного момента может превышать номинальный в 12-15 раз. Управлять величиной этого момента можно по принципам, рассмотренным выше; Открывание выпрямляющего тиристора до окончания процесса конденсаторного торможения приводит к возникновению пика переходного момента короткого замыкания и прекращению Конденсаторного торможения аналогично тому, как это имеет место при реализации КДТ по второму и третьему принципам в схемах контакторного управления с -малым сопротивлением цепи выпрямленного тока. На осциллограмме (рис. 63) зафиксирован типичный тормозной процесс, соответствующий третьему принципу реализации КДТ -полному наложению режимов, когда конденсаторное торможение прекращается сразу при открывании выпрямляющего тиристора. После этога начинается режим динамического торможения, осложненный повторными короткими замыканиями с пиками тормозных и двигательных моментов. f Рис. 63. Осциллограмма конденсаторно-динами- g~ . ческого торможения двигателя А02-31-4 с тиристорным управле- i нием по схеме N° 9 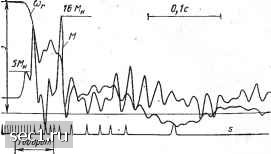 Применение КДТ при тиристорном управлении без yHCTaf этих особенностей может привести к значительному ухудшению показателей режима торможения Для повышения эффективности торможения следует реализовать КДТ по первому" принципу с последовательным действием режимов. Для малоинерционных приводов возможно применение и второго принципа для получения большого .переходного тормозного момента в начале второго этапа торможения. В обоих случаях для по-: вышения эффективности и плавности динамического торможения на втором этапе следует Отключать конденсаторы. КДТ МОЖНО- применять для формирования кривой момента с целыб получения заданного темпа замедления привода или, напротив, весьма интенсивного снижения его скорости на первом этапе торможения. При высоких требованиях к управляемости режима тиристоры можно использовать тслько в качестве быстродействующих контакторов. Величина возбуждаюгцего-выпрямленного тока должна устанавливаться изменением активного сопротивления цепи без использования фазового-управления тиристорами. Динамические характеристики тормозных режимов при МДТ и КМТ с тиристорным управлением не отличаются от рассмотренной выше. Наибольший тормозной эффект в этих способах достигается при симметричном замыкании трех фаз. статорной обмотки двигателя встречно-параллельно включенными тиристорами, которые выполняют только роль быстрот действующих контакторов. Быстрота коммутации более необходима при МДТ для отключения обмоток двигателя от сети и их последующего замыкания без заметного снижения величины остаточного потока. В заключение необходимо подчеркнуть, что при тиристорном фазовом управлении асинхронными электроприводами наиболее рационально применять динамическое торможение. Реализация преимуществ комбинированных способов торможения приводит, как правило, к значительному усложнению сило- вой части тормозного устройства и требует в отдельных слу- - 12Ii 0 ... 35363738394041 ... 43 |