
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 3456789 ... 43 pc 9. Схемы управления пвигателями при контроле противотокового торможе-лия реле РКС  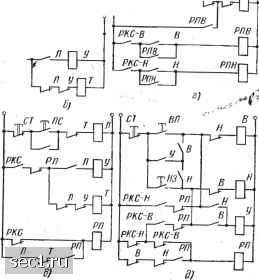 тзующими данному на- тг поавлению вращения, на- L-JLT пример РКСВ, было К. включено промежуточное реле этого направления РПВ,. поэтому после отключения контактора В через замкнутые замыкающий контакт РПВ и размыкающий блок-контакт В включается контактор противоположного направления Я. Торможение будет продол-жаться до тех пор, пока яе разомкнётся контакт РКС-В и не выпадет реле РПВ, отключающее контактор Н. Реле РПВ ж РПН предотй)ащают также включение отключенного двигателя при провороте его вала. По схеме рис. 9, г выполняются аналогичные функции при использовании при пуске и торможении токоограничивающих резисторов, собранных по силовой схеме на рис. 8, б. Отличие данной схемы управления в том, что реверс производится с промежуточной остановкой, для чего нужно сначала нажать кнопку СТ, и только после окончания противотокового торможения можно пускать двигатель в другую сторону, нажимая на соот-. ветствующую кнопку ВП или НЗ. Пусковые кнопки нужно держать нажатыми, пока не включится контактор У, шунтирующий токоограничивающие резисторы. Управление контактором производится в функции скорости контакторами РКС-Н или РКС-В в зависимости от направления вращения двигателя. При Использовании замыкающего и размыкающего контактов реле /(С одного направления необходимо учитывать, что они имеют общую точку. В схеме возможно применение одного промежуточного реле РЯ, .выполняющего только функцию защиты от .•самовключения двигателя при повороте его вала. Торможение двигателя при нажатии кнопки СТ производится, как и в предыдущей схеме, включением контакторов противоположного на-Равления, которое реализуется и контролируется непосредст- 1 2 70 1Ь  U a) 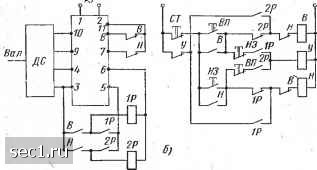 Рис. 10. Схемы управления двигателем при контроле противотокового .торможения бесконтактными устройствами УБТ венно замыкающими контактами реле РКС соответствующего направления. Достоинство бесконтактных устройств для контроля скорости типа УБТ заключается в возможности настройки усилителя для срабатывания исполнительных реле при различных величинах скорости двигателя. При использовании УБТ бесконтактный датчик ДС сое;[1иняется с валом двигателя вместо реле РКС. Выводы датчика подключаются к усилителю, на выход которого включаются исполнительные реле с напряжением питания 24 В постоянного тока, например, типов ПЭ-1, МКУ-48, КДР.и др. Контакты реле управляют контакторами сйловы схем, которые остаются такими же, как на рис. 8. Для управления торможе-. нием привода одностороннего вращения применяют устройство УБТ-1 е одним исполнительным реле, а., для приводов с двумя направлениями вращения УБТ-2 с двумя реле. Типичные схемы управления приведены на рис. 10. Схема, показанная на рис. 10, а, аналогична простейшей схеме с реле РКС (см. рис. 9, а). Однако самовключения двигателя при повороте вала здесь не происходит, поскольку реле Р, которое в данной схеме выполняет функции реле РКС, при зомкнутом блок-контакте Л не включится. Схема на рис.* 10 б аналогична схеме, на рис. 9, й и предназначена-для уп-зэавления двигателем с двумя направлениями вращения- и включением токоограничивающих резисторов при пуске и торможении. При нажатии, например, кнопки ВП контактор В сра-.атывает .и включает двигатель в заданном направлении. Одновременно замыкающим и размыкающим блок-контактами В в цепях усилителя подготавливается цепь включения реле IP, которое срабатывает и самоблокируется при заданной частоте вращения вала двигателя. После включения IP включается контактор У, шунтирующий токоограничивающие резисторы. При нажатии кнопки СТ выпадают контакторы В и У, после чего через замкнутый контакт IP включается контактор Я. Двигатель тормозится до тех пор, пока при близкой к нулю частоте вращения не выпадет реле IP, отключающее контактор Я и возвращающее схему управления в исходное состояние готовности к новому запуску двигателя. Электромагнитные переходные процессы оказывают значи- тельное влияние на динамику противотокового торможения, так как возникающие переходные ьюменты достигают особенно больших величин. Последнее обусловлено наличием в большинстве случаев в момент коммутации остаточного незатухшего магнитного потока двигателя. В зависимости от величины и . особенно фазы вектора этого потока относительно потока, создаваемого в двигателе в момент включения системой питающих напряжений, может изменяться в широких пределах скорость лриращения магнитного потока и соответственно величина апериодической составляющей тока намагничивания, определяющая образование свободных составляющих переходного момен- та. Если подключение двигателя к сети произойдет в момент, когда величина и фаза затухающего остаточного потока будут соответствовать величине и фазе вынужденного потока, то пе-ре:одные составляющие момента будут минимальны. При расхождении этих величин переходный момент растет и может достигать больших значений. При одной и той же величине остаточного потока величины переходных моментов могут иметь резко отличные значения только за счет его фазы. Осциллограммы реверса на холостом ходу двигателя .А02-31-4 с суммарным приведенным моментом инерции привода, равным 1,85 момента инерции ротора, и статическим моментом, составляющим 0,1 Ми, приведенные на рис. 11, сняты для реверса с незатухшим остаточным магнитным полем. Осциллограмма на рис.-11, а соответствует благоприятному момейту Ьключения, а осциллограмма и на рис. 11, б - включению, когда фазы потоков не совпадают. Если реверс производится при Нулевых начальных условиях с* полностью затухшим остаточ-«Ь1м полем, то пики переходного момента имеют стабильную 0 ... 3456789 ... 43 |