
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 45678910 ... 43 5,8 Mf, 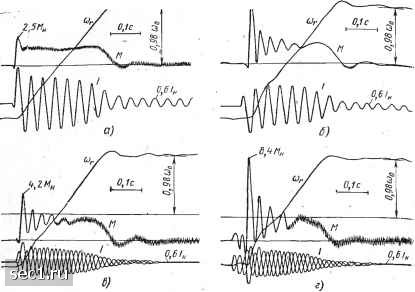 Рис. 11. Осциллограммы реверса двигателя А02-31-4 при различных начальных электромагнитных условиях величину 4-5 Мн (рис. 11, в). Существенное влияние на величину переходного момента оказывает неодновременное включение контактов, создающее ненулевые начальные условия, чтО приводит (рис. 11, г) к результатам, аналогичным наличию-остаточного магнитного поля. Наиболее вероятными являются начальные пики момента, равные 5-6 Мц. Возможны и пики, доходящие до 10-12 М,,. особенно при неодновременном замыкании контактов. Пульсации переходного момента затухают значительно медленнее, чем при пуске. Преобладают положительные (тормозные) составляющие, которые заметно увеличивают среднее значение тормозного момента и интенсивность торможения, поэтому для малоинерционных станочных приводов за счет переходного момента время торможения уменьшается примерйо на 20%, а тормозной путь из-за резкого снижения скорости в начале торможения примерно на 30 7о.. С ростом мощности двигателей увеличивается кратность возможного пика момента, который У двигателей мощностью свыше 15 кВт может- достигать 15 Ма-При увеличении момента инерции привода его скорость изменяется медленнее, поэтому переходная составляющая момента затухает также медленнее и число колебаний момента возрастает. Соответственно увеличивается число ударов в кинематической цепи привода. Вместе с тем уменьшается влияние переходного момента на время и путь торможения. Для инерцион-26 , приводов определение-времени и пути торможения может изводиться по статической механической характеристике. "Ограничение переходных моментов возможно путем гашения яточного магнитного поля перед началом торможения и ре-*"яир0вк0й контактов для. их одновременного . включения, что Фактически трудно реализуемо. Полное подавление переход-- ых моментов возможно только с помощью быстродействующих иристорных коммутаторов II]. При этом значительно улучшается динамика торможения, повышаются его стабильность и точность, снижаются удары и перегрузки в кинематических цепях. Вместе с тем несколько снижается интенсивность торможения. Наиболее существенным недостатком противотокового тор--моженияявляются большие потери энергии, значительно превышающие потери при других способах торможения. Обычно торможение производится на холостом ходу, и влиянием стати-•ческого "момента на процесс торможения можно пренебречь. Б этом случае потери энергии в роторе двигателя за время торможения , 1Г, = 3/2Дж, (4) тде 7s-Суммарный приведенный момент инерции привода. Если пренебречь величиной тока намагничивая, малой по сравнению с величиной тока статора, что для данного режима жполне допустимо, то потери в статоре r, = ir,Z?- Дж, . (5) г где В - коэффициент, зависящий от формы пазов ротора. Для двигателей мощностью до 0,6 кВт его можно принимать равным I. а для более мощных (в зависимости от формы паза ротора) •он доходит до 0,4-0,5. Суммарные потери в двигателе изменяются, следовательно, В пределах от четырех- до шестикратной величины кинетиче-Ской энергии, запасаемой вращающимися с синхронной скоростью массами привода. Эти потери в 2,5-3 раза превышают •потери при пуске. Соответственно уменьшается и число включений двигателя, допустимое по условиям нагрева, в единицу времени. Существенное, уменьшение величины потерь может быть до-тигнуто при совмещении противотокового торможения с ка-им-либо другим способом, снижающим угловую скорости в начале торможения. Для малоинерционных приводов малой мощности, таким способом торможения может быть магнитное. Ес-J Например, в этом случае противотоковое торможение начнется со скорости, равной даже 0,5 соо, то .потери уменьшаются примерно в 4 раза. Однако реализация магнитно-противотоко-вого торможения (МПТ) затруднительна, поскольку в схему управления необходимо ввести соответствующие элементы, значительно ее усложняющие и требующие тщательной настройки и регулировки контактов. Более просто реализуется конденса-торно-противотоковое торможение (КПТ) путем глухого симметричного подключения конденсаторов к статору двигателя без добавочных коммутирующих аппаратов. В этом случае значительно улучшается динамика торможения за счет резкого уменьшения влияния электромагнитных переходных моментов. , ДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ При подключении к статорной обмотке отключенного от сети, но с вращающимся по инерции ротором асинхронного двигателя источника постоянного или выпрямленного напряжения создается неподвижное в пространстве магнитное поле, которое возбуждает генераторный режим, наводя в обмотке "ротора ЭДС и токи, взаимодействующие с вызвавшим их магнитным потоком и создающие тормозной момент. Такое торможение получило название динамического, и его ширбко применяют в электроприводе станков. Динамическое торможение весьма экономично,, поскольку потери энергии в роторе двигателя за время торможения вхолостую и>п ir. = /s-f-Дж. (6> а потери в статоре для основных, наиболее распространенных схем включения возбуждающего тока W, = WrB-nM. (7> Поэтому суммарные потери примерно в 3 раза меньше и соответственно больше допустимое по нагреву число торможений в единицу времени. Рассмотрим влияние электромагнитных переходных явлений на процесс торможения. Типичные статическая и динамическая механические характеристики асинхронного короткозамкнутого двигателя, приведенные на рис. 12, показывают существенное влияние электромагнитного переходного момента на режим динамического торможения. В начале торможения при высокой скорости ротора на статическую характеристику накладываются знакопеременные затухающие моменты, обусловленные как коммутационными явлениями, так и начальными электромагнитными условиями. 28 л- * 0 ... 45678910 ... 43 |