
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 6789101112 ... 43 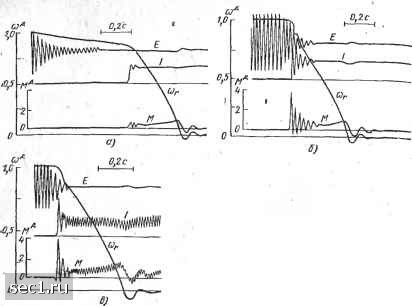 Рис. 15. Осциллограммы динамического торможения асинхронного короткозамкнутого двигателя при , подключении статорной цепи к источнику постоянного напряжения (а, б) и к двухполупе-риодному выпрямителю (в) при затухшем (а) и незатухшем (б, в) остаточном магнитном потоке двигателя нитного переходного процесса, вызывая пульсации возбуждающего тока и соответственно тормозного момента. Наличие в цепи статора короткозамкнутого контура, что является характерной особенностью схем второй группы, увеличивает демпфирующее действие обмоток и резко изменяет ха-. рактер переходного процесса. В начале торможения при ненулевых начальных условиях преобладает составляющая переходного момента, обусловленная эффектом магнитного торможения, что вызывает быстрое затухание остаточного потока ротора и малое проявление второй составляющей от взаимодействия этого поля с вынужденным потоком статора. В малоинер-адионных приводах происходит почти мгновенный сброс скорости и затем более. медленное её снижение под действием установившегося тормозного момента. Поэтому фактическая величина максимального тормозного момента при низкой скорости меньше Отличается от его величины по статической характеристике. Демпфируется и переходный процесс в конце торможения. Как правило, имеет место только один переход через нулевое значение скорости. В схемах третьей группы из-за ослабления главного потока, имеющего теперь утроенное число пар полюсов, и усиления потоков рассеяния переходные моменты как в начале, так и в конце торможения малы и различие между статической и динамической характеристиками незначительно. Определение пути Я времени торможения в этом случае даже для малоинерцион-32 : Hbix приводов может производиться по статической характеристике. Достоверно параметры процесса торможения при включении обмоток двигателя по схемам второй и первой групп могут быть определены только с учетом влияния электромагнитных переходных моментов, что наиболее просто осуществляется с помощью математического моделирования [10]. Приближенный учет переходных моментов при конструировании и анализе действия тормозных- устройств малоинерционных приводов станков, обычно выполняемых при включении обмоток двигателя 00 схемам первой группы к двухполупериодному выпрямителю, можно производить, имея в виду изложенные выше соображения, а также нижеследующие положения. При включении двигателя с незатухшим остаточным магнитным .полем ротора возникает знакопеременный переходной момент, имеющий тормозной характер. Первый пик тем больше, чем быстрее происходит коммутация статорных цепей двигателя, и может достигать 4-6 М. Время затухания колебаний переходного момента зависит от сопротивления цепи .статора и быстроты уменьшения скорости. Обычно имеют место три-- пять пульсаций момента. При нулевых электромагнитных начальных условиях переходные моменты в начале торможения проявляются незначительно и могут не учитываться. Из-за влияния переходных составляющих фактическая величина максимального (критического), тормозного момента составляет только половину величины, соответствующей устано-виЁшемуся режиму при данной скорости вращения (по статической характеристике). В конце торможения возникают колебания скорости привода, увеличивающие время торможения. При торможении с нулевыми начальными, условиями фактическое время торможения без учета этих к«лебаний возрастает на 20-30% против времени, определямого по статической -характеристике. Полное время торможения с учетом времени колебаний увеличивается вдвое. Переходные моменты в начале торможения, возникающие при ненулевых условиях, уменьшают время торможения. При величине остаточного потока (и остаточной ЭДС i), равной примерно 0,6 номинального, полностью компенсируется снижение эффективности торможения от уменьшения критического Момента. Если остаточный поток превышает 0,75 номинального. То действие переходных моментов преобладает и фактическое время торможени без учета колебаний скорости в конце торможения оказывается меньше, а полное время, примерно соответствует рассчитанному по статической характеристике. С увеличением инерционности привода влияние переходных-Моментов на время торможения уменьшается. При суммарном Приведенном моменте инерции привода, превышающим пятикратную величину момента инерции ротора двигателя, можно. 2 Зак. 1589 - • : 33 считать, что в зоне низких скоростей динамическая характеристика соответствует статической. Увеличение статического момента нагрузки увеличивает влияние переходных моментов иа время и путь торможения, снижает фактическую величину критического момента, но демпфирует колебания скорости, в кон] торможения. Приведенные выше данные о влиянии переходных моментов справедливы при величинах статического момента меньше 0,1-0,2 УИц, что имеет место во многих приводах станков. Повышение эффективности динамического торможения возможно путем увеличения возбуждающего тока, но при этом значительно увеличивается влияние переходных моментов на время и путь торможения, а следовательно, снижается точность торможения, увеличивается нагрев статорных обмоток двигателя. Более рациональным способом управления переходными моментами и повышения эффективности торможения для приводов станков является увеличение тормозного момента в начале торможения за счет других способов торможения, например магнитного или конденсаторного. МАГНИТНО-ДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ Использование энергии остаточного затухающего магнитно- го поля для предварительного снижения скорости перед подачей выпрямленного тока может существенно повысить эффективность процесса торможения. Применение такого магнитно-динамического торможения (МДТ) особенно целесообразно в тех случаях, когда необходимо получить быструю и точную остановку малоинерционных приводов или повысить точность останова инерционных приводов за счет уменьшения разброса величин пути и времени торможения [15]. 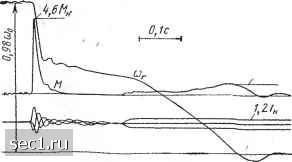 0,67Г1, Рис. 16. Осциллограмма магнитно-динамического торможения асинхронного Двигателя А02-21-4 (привед-енный суммарный момент инерции привода составляет 1,6 момента инерции ротора двигателя; статический лломент нагрузки меньше 0,1 номинального) 0 ... 6789101112 ... 43 |