
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 23242526272829 ... 57 няя кривая на рис. 8-2). Температурные коэффициенты активного сопротивления магниторезистора составляют: для InSb примерно 1%/град, а для InAs примерно- 0,2%/град. Вайс [Л. 493] описал магниторезистор FP50, выполненный из InSb, с мень- шей зависимостью активного сопротивления от температуры. Средний коэффициент составляет около О, 2%/град. В работах (Л. 66 и 394] сообщается о частотной зависимости явления магнитосопротивления в InSb и InAs. Исследования были выполнены в постоянном магнитном поле при питании образца (диска Корбино или прямоугольной пластины) током высокой частоты. На рис. 8-5 [Л. 66] показаны результаты измерений на прямоугольной пластине пз InSb 6X3X0,15мм, о = 90ioM • см)-\ Г=22° С]; видно, что значение Rb/Ro при / = 600 Мгц уменьшается примерно в 2,5 раза. На рис. 8-6 и 8-7 приведены результаты, относящиеся к магниторезисторам из InAs. Рисунок 8-6 относится к образцу в виде диска Кор-
Рис. 8-5. Частотная зависимость эффекта магнитосопротивления в пластине из InSb [Л. 66].
0 2 4 6 8 10 12 Пкгс Рис. 8-6. Частотная зависимость эффекта магнитосопротивления в образцах с формой диска Корбиио [Л. 661. 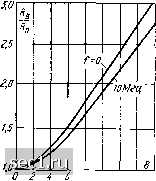 8 10 12 14 кгс Рис. 8-7. Частотная зависимость эффекта магнитосопротивления в прямоугольной пластине из InAs [Л. 66]. бино; при йастоте f=lO Мгц не видно разницы в ходе характеристики Rb/Ru ио сравнению с f=0, тогда как в случае прямоугольного образца размерами 6Х4Х Х0,46 мм (рис. 8-7), при той же самой толщине, что и у диска Корбино, разница в ходе характеристик при /=0 и [=10 Мгц составляет около 10%. Глава девятая КОМПЕНСАЦИЯ ТЕМПЕРАТУРНОГО ДРЕЙФА Из температурных характеристик датчиков Хэлла, описанных в § 5-5 и 7-4, следует, что не во всех случаях можно получить температурные свойства, соответствующие заданным требованиям. Этих недостатков датчиков Холла можно частично избежать, используя схемы термокомпенсацни. Однако необходимо подчеркнуть, что в результате улучшения параметров датчиков Холла проблема компенсации влияния температуры не играет уже такой роли, как в 1956- 1960 гг. В настоящее время высокий уровень технологии датчиков Холла, изготовляемых из InAs и InAsP, позволяет получать точность датчиков Холла в пределах 1-2% в интервале температур ±20° С. Этого же можно добиться, схемно компенсируя влияние температуры и в случае датчиков Холла из InSb [Л. 416]. В случае германиевых и кремниевых датчиков Холла применение источников питания с большим внутренним сопротивлением также позволяет выполнить указанные условия. Отсюда видно, что схемная компен- f сация влияния температуры должна применяться в основном для датчиков Холла из InSb, которые в некоторых случаях незаменимы. Если возникает необходимость обеспечения большой точности схем, в которых применены другие датчики Холла, использование термокомпеисационных схем также бывает неизбежным. Компенсацию влияния температуры на выходную характеристн-Гку датчика Холла можно получить при включении в схему элемента с ограниченным и известным значением температурного дрейфа. Компенсирующий элемент может быть включен во входную или выходную цепь последовательно или параллельно. При этом может быть скомпенсировано изменение как выходного напряжения (если активное сопротивление нагрузки гораздо больше активного сопротивления датчика Холла R:>Ry), так и выходного тока (когда R-Ry). Могут применяться также смешанные компенсационные схемы. Выбор компенсационной схемы зависит от условий работы датчика Холла. Компенсацию во входной цепи рекомендуется использовать там, где входным сигналом является магнитное поле, а ток служит для установки рабочей точки. Потери в компенсирующем элементе покрываются источником питания, а не за счет полезного сигнала. Отсюда следует, что компенсация во входной цепи обычно должна применяться в схемах измерения напряженности магнитного поля. Компенсацией в выходной цепи пользуются в случае, когда ток х является входным сигналом (например, при нспользовании перемножающих свойств датчика Холла). Тогда мощность, которая рас- ходуется на резисторе будет гораздо меньше той, что расходуется во входной цепи. Выбор последовательного или параллельного включения элемента комиепсацин зависит от возможности нагружеиия датчика Холла и величины компенсирующего резистора. В схемах с низкоомными датчиками Холла, потребляющими большие токи Ix, выгоднее использовать параллельные схемы с Rk>Rx, нз-за чего мощность, расхо.чуемая в резисторе Дк, будет небольщой. При использовании датчиков Холла .с большими активными сопротивлениями выгоднее будет последовательная компенсация с помощью элемента, обладаю-п,сго малым активным сопротивлением и большим температурным коэффициентом. Аналогично решается проблема ко.мпенсации для выходной цепи. Если компенсация осуществляется в интервале температур, в котором температурные изменения характеристик датчика являются моиотоппыми и приблизительно линейными, то в качестве элементов компенсации можно использовать проволочные резисторы с монотонно изменяющимся сопротивлением. В случае нелинейных изменений в качестве компенсирующих элементов часто используют полупроводниковые материалы. Важным условием является необходимость соблюдения одинаковых тепловых условий для датчиков Холла и компенсирующих элементов. Если компенсация влияния температуры не дает удовлетворительных результатов (очень сложная схема, большие нелинейности коэффициентов а и (3 или недостаточная точность компенсации), используется термостатирование датчика Холла. Оно может быть реализовано при помощи обычного лабораторного жидкостного термостата с наружной циркуляцией, из которого термостатирующая жидкость подводится к контейнеру, содержащему датчик Холла. Температура термостатирующей жидкости может быть равна окружающей температуре или ниже (если используется, например, смесь спирта с сухим льдом). Второй вариант основан на помещении датчика Холла в нагре-в.чтеле, в котором будет находиться также термочувствительный элемент (например, терморезистор), и термостатирование будет основано на поддержании датчика Холла при постоянной температуре, но большей, чем температура окружающей среды. Это может быть связано с ухудшением условий работы датчика Холла и прежде всего. с ограиичением значения тока fx и уменьшением чувствительности. В отношении датчиков Холла, изготовленных из InSb, особенно выгодным было бы термостатирование в сосуде, заполненном жидким азотом (Г=78°К). Кроме точного поддержания постоянства температуры, соответствующей температуре кипения азгта, при этом достигается такое улучшение свойств датчика Холла, какого невозможно получить ни в одном из известных до настоящего времени полупроводниковых материалов (см. §3-3). Этот способ довольно сложен, но на практике он используется, что дает возможность получать необычайно высокую чувствительность и выходное напряжение датчика Холла. Основным недостатком термостатирования является, очевидно, необходимость увеличения размеров конструкции с датчиком Холла, что в ряде применений неприемлемо. В случае применения перемножающих узлов можно термостатировать всю схему совместно с магнитной цепью. Струт [Л. 450] указал на возможность термостати- рования датчика Холла без увеличения его размеров. Действительно, в случае датчиков Холла, изготовленных из материала с большим температурным коэффициентом сопротивления а, можно использовать сам датчик Холла как термостатирующий элемент. Для этого через датчик Холла дополнительно пропускается ток с частотой, отличной от частоты управляющего тока Ix, и используется управляющая схема, работающая избирательно на «термостатирующей» частоте, но на то же самое сопротивление Rx- Очевидно, что этот метод приводит к ограничению величины тока Ix, а значит, и чувствительности датчика Холла, но тем не менее применение его в некоторых случаях может быть целесообразным. Глаьа десятая ЭКВИВАЛЕНТНАЯ СХЕМА ДАТЧИКА ХОЛЛА Этой проблема уделялось до настоящего времени сравнительно мяло внимания, о чем свидетельствует небольшое количество работ, в которых рассматривалась эквивалеитная схема датчика Холла. Основной является работа Курта и Хартеля [Л. 280], в которой авторы сформулировали уравнение четырехполюсника, описывающего • датчик Холла. Пользуясь обозначениями, приведенными на рис. 10-1, можно описать этот четырехполюсник следующей системой уравнений: 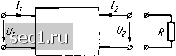 (10-1) Рис. 10-1. Схема четырехполюсника, замещающего датчик Холла ГЛ. 280]. Зная основные свойства датчика Холла из гл. 5 и 7, можно легко определить компоненты матрицы импеданса рассматриваемого четырхполюсника. Из условия /2=0 следует, что U2=UyH (э. д. с. Холла, а также /,=0 (10-2) где индекс В означает, что входное сопротивление Rx зависит от индукции в, и (10-3) Из условия /i=0 следует, что напряжение t/i = t/iH (вторичная э. д. с. Холла), а также, что /,=0 (10-4) (10-5) 169 в связи с этим можно написать = YoBA + (10-6) Очевидно, что будут справедливы следующие равенства: h=Ix. h=Iy. Матрица сопротивления, описывающая датчик Холла, будет I Z„„ II = (10-7) Анализ датчика Холла продолжили затем Эндсли и согрудиикн [Л. 115], а также Мото (Л. 339]. Основные параметры четырехполюсника, т. е. полные входное и выходное сопротивления, а также коэффициенты усиления по току и по напряжению выражаются следующими зависимостями; » 2„х = - / - вых - 22+2 AZ + Z22ZU ki.= - 21 22 + 2 (10-8) (10-9) (10-10) (10-11) где AZ=ZiiZ22-2i222i, 2 - сопротивление нагрузки, 2, - внутреннее сопротивление источника питания, К - коэффициент усиления по напряжению, kt - коэффициент усиления по току. Для постоянного тока или переменного тока низкой частоты импеданс и усиление в идеальном датчике Холла будут следующими; Z„ = вых - RxbR,b--Ib + RxbR . RyB + R RxsRyB-ub+ R.bR- RxB + R RB RxBRyB--ile + R,BR RyB + R (10-12) (10-13) (10-14) (10-15) Параметры конкретного датчика Холла, описываемые зависимостями (10-12)-(10-15), будут функциями магнитной индукции и параметров схемы, с которой совместно работает датчик Холла (Rk и R). Мото [Л. 339] предложил эквивалентную схему датчика Холла, показанную на рис. 10-2, соответствующую матрица сопро-тивлеиня (10-15), а также зависимостям (10-10)-(10-15). 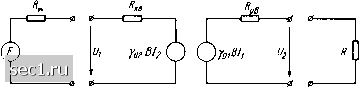 Рис. 10-2. Эквивалентная схема датчика Холла [Л. 339]. Проведенные рассуждения относятся к идеальному датчику Холла. Затруднения появляются при учете некоторых вредных явлений, имеющих место в датчиках Холла (например, остаточного напряжения). Варша [Л. 484] и Кончиц [Л. 612] рассматривали  У Рис. 10-3. Эквивалентная схе-ма датчика Холла, применяемая для определения величины сопротивления, компенсирую-0 щего остаточное напряжение [Л. 484]. датчик Холла в виде неуравновешенного моста, показанного на рис. 10-3. Такой подход позволил аналитически определить величи- ну сопротивления, компенсирующего резистивное остаточное напряжение, в схеме, показанной на рис. 7-7,а. Оно равно: (10-16) Глаа одиннадцатая МАГНИТОПРОВОДЫ для ДАТЧИКОВ ХОЛЛА И МАГИИТОРЕЗИСТОРОВ Работа датчиков Холла и магииторезисторов тесно связана с воздействием на них различных магнитных полей. Источниками этих полей являются; а) поля рассеяния магнитопроводов, в которых существует магнитный поток; б) поля, образующиеся вокруг проводника с током; в) соленоиды; г) электромагниты; Д) магнитопроводы из постоянных магнитов. 0 ... 23242526272829 ... 57 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||