
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 35363738394041 ... 57 1S-3. ИЗМЕРЕНИЕ И РЕГУЛИ1>0ВАНИЕ ВРЛ1ДА10ЩЁГ6 МОМЁНТА В МАШИНАХ ПОСТОЯННОГО ТОКА Известно, что вращающий момент электродвигателя равен произведению магнитного потока Ф главных полюсов и тока якоря /;: M = kOIt. (15-1) Если поместить датчик Холла в центр полюсного наконечника и принять с некоторым приближением, что В=т (15-2) (на практике используются несколько датчиков Холла, размещенных в нескольких точках наконечника), а через датчик Холла пропустить управляющий ток 1, пропорциональный току якоря It=hL, (15-3) то вращающий момент iBkJx. (15-4) Вращающий момент,, следовательно, прямо пропорционален выходному напряжению датчика Холла. Напряжение Холла и у может быть иапользовано после > > Рис. 15-1. Устройство регулятора момента вращения в двигателях постоянного тока. Рис. 15-2. Устройство ограничителя вращающего момента в двигателях постоянного тока. усиления для регулирования вращающего Момента или же для сигнализации о превышении определенного его значения. На рис. 15-1 дана схема системы, которая позволяет поддерживать постоянное значение вращающего момента двигателя постоянного тока. Напряжение Uy подводится к усилителю 2 с коэффициентом усиления А. После усиления часть напряжения AUy, отвечающая определенному вращающему моменту, устанавливается с помощью потенциометра R и 1Компенсируется напряжением Uu. В случае изменения величины вращающего момента относительно установленного значения появляется разность между напряжениями AUy w U. Она подается на вход усилителя 1, а тот в свою очередь управляет изменением тока якоря или тока возбуждения i, т. е; магнитного потока через полюсы, доводя таким способом величину момента до соответствующего значения М. На рис. 15-2 представлена схема сигнализации или выключения двигателя в случае превышения некоторого предельного значения вращающего момента. 15-4. ИССЛЕДОВАНИЕ ПРОЦЕССОВ КОММУТАЦИИ Коммутация в машинах постоянного тока является, как известно, одним из главных конструктивных и эксплуатационных вопросов. Как при ускоренной, так и при замедленной коммутации возникает м. д. с. коммутационных токов в короткозамкнутой секции якоря, которая усиливает или ослабляет магнитный поток главных полюсов. При ускоренной коммутации возникает усиление потока в генераторах и ослабление в двигателях, при замедленной коммутации - наоборот. В работах [Л. 304, 620, 627, 629] представлены результаты обширных исследований процессов коммутации с помощью датчиков Холла. Применение датчиков Холла позволяет быстро и точно получить все необходимые для расчетов и испытаний характеристики, а также дает возможность учесть ряд важных явлений, как, например, влияние дополнительного поля тока коммутации на значение и форму поля коммутации, влияние петли гистерезиса на процесс коммутации, возможность оптимального расположения щеток не только с точки зрения их искрения, но также стабильности машины и т. п. 1$-$. РЕГИСТРАЦИЯ УГЛА 6 СИНХРОННЫХ МАШИН Лифанов и Дорм [Л. 621] запатентовали приспособление для регистрации угла 6 синхронных машин с помощью механически сопряженного с валом исследуемой трехфазной машины тахогенератора с ротором, создающим вращающееся магнитное поле. Характерной чертой приспособления является то, что ротор тахогенерато,ра является цилиндрическим и имеет разделенную трехфазную обмотку, причем обе машины питаются от общей сети таким образом, что магнитное поле тахогенератора вращается в сторону, противоположную направлению (Вращения исследуемой машины. Статор тахогенератора изготовлен в виде цилиндра, к внутренней поверхности которого прикреплен датчик Холла; токовая цепь по- f  сеть. /22/>22 /2 уух Рис. 15-3. Эскиз тахогенератора для исследования угла 9 синхронной машины. следнего питается постоянным током. При этом, благодаря наличию в зазоре тахогенератора вращающегося магнитного поля, увеличивается точность регистрации рабочего угла и упрощается устройство. На рис. 15-3 дан эскиз конструкции тахогенератора. Статор 7 не имеет ни пазов, ни обмотки и служит только для уменьшения магнитного сопротивления. На якоре 2имеется трехфазная разделенная обмотка, концы обмотки подсоединяются к контактным кольцам 5 на валу. Якорь тахогенератора через -кольца подсоединяется к той же сети, что и испытуемая машина. Напряжение на якоре должно иметь обратную последовательность фаз. Возникающее (В зазоре тахогенератора магнитное поле вращается с той же скоростью, что и якорь, но в цротивоположном направлении. Поэтому поле в зазоре неподвижно в пространстве, т. е. относительно статора. Распределение поля в магнитопроводе статора должно быть синусоидальным. Так как назначением тахогенератора является получение неподвижного ,в пространстве и точно синусоидального магнитного поля, обмотка якоря тахогенератора 238 должна выполняться с укороченным шагом у = 0,8т, где г/ - шаг обмотки, а т -полюсное деление. На внутренней поверхности статора тахогенератора укреплен датчик Холла 4. В тахогенераторе предусмотрена также возможность вращения статора, так как ось его поля может принимать произвольное положение относительно датчика Холла. Статор необходимо установить в таком положении, чтобы напряжение на выходе датчика Холла было равно нулю на холостом ходу испытываемой машины. При установке статора необходимо также измерять максимальное напряжение Холла, отвечающее амплитуде поля. При нагрузке синхронной машины ось поля тахогенератора сдвигается относительно своего исходного положения на угол 6. Это вызывает появление напряжения на датчике Холла Uy = kB (В - магнитная индукция ,в месте расположения датчика Холла). При синусоидальном распределении поля значение указанного напряжения Uy=.k smQ. Если электроды напряжения датчика Холла подсоединены к осциллографу, например, шлейфовому, то можно зарегистрировать изменение sin 6 при исследовании переходных процессов в синхронных машинах. Из других применений следует упомянуть об осцил-лографическо.м исследовании электромагнитного момента машин переменного тока [Л. 586, 587], а также об измерении скольжения асинхронных машин {Л. 657]. Глава шестнадцатая ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН Датчики Холла нашли также широкое применение для измерения электрических величин, в особенности для измерения силы тока и мощности. Предлагалось также измерять с помощью датчиков Холла расход электрической энергии, сопротивление, частоту, фазу, а также преобразовывать постоянный ток в переменный и переменный в постоянный. 16-1. ИЗМЕРЕНИЕ ТОКА Известно много методов, приборов и приспособлений для измерения силы тока величиной от пикоампер до килоампер, от постоянного тока до тока с чахтотой по- рядка мегагерц, с- точностью от сотых долей процента до нескольких процентов. Оказалось, однако, что существуют еще такие измерения силы тока, которые можно осуществить только с помощью датчиков Холла, как, например, измерение тока без разрыва цепи, исследование распределения тока в электрических ваннах, а также такие измерения, которые наиболее экономично и технически эффективно осуществляются при использовании датчиков Холла. Такими являются, например, измерения постоянного тока силой 5-10 ка, измерения токов импульсных и с искаженной формой. Применяемые для этой цели шунты не требуют, правда, отдельного источника питания и обеспечивают непосредственное измерение, но при измерениях токов более 10 ка шунты становятся слишком громоздкими и сами потребляют мощность порядка нескольких киловатт. Выходное напряжение шунта составляет 60-100 мв. Такое напряжение доста-точно для измерения, но слишком м.ало для целей регулирования; следовательно, необходимо его преобразовать п усилить, а это усложняет и удорожает устройство. Магнитные усилители, также применяемые для измерения сильных токов, потребляют мощность от нескольких десятков до нескольких сотен ватт. Наличие обмоток создает необходимость предотвращения перенапряжений путем установки разрядников. Магнитные усилители относительно чувствительны к внешним возмущающим полям и к приближению ферромагнитных масс. Технология производства магнитных усилителей сложнее, чем приборов на основе датчиков Холла. Как шунты, так и магнитные усилители необходимо встроить постоянно в измерительную цепь. Это затрудняет наладку измерительных схем, требуя выключения питания. Измерение силы тока с помощью датчиков Холла основано на измерении напряженности магнитного поля, создаваемого вокруг проводника с током. Измерения 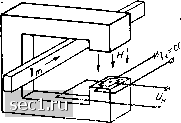 Рис. 16-1, Измеритель больших постоянных токов с ярмом. могут быть сделаны как с помощью одного только датчика Холла без магнитной цепи, так и с помощью датчика Холла, находящегося в зазоре между концентраторами, а также с помощью датчика Холла в зазоре сердечника, охватывающего проводник с током (рис.16-l). Измерение тока с помощью датчика Холла без магнитной цепи применяется очень редко из-за малой точности. Отсутствие магнитной цепи означает, что измеряемая напряженность магнитного поля, а значит, и напряжение Холла очень малы и в связи с этим может иметь место сильное влияние внешних магнитных полей и ферромагнитных масс. Кроме того, так как напряженность магнитного поля обратно пропорциональна расстоянию от проводника с током, необходимо стрвмиться к расположению датчика Холла возможно ближе к поверхности проводника. Однако в этом случае датчик Холла будет находиться в магнитном поле с очень большим градиентом напряженности поля (см. § 13-1 и рис. 13-4) и точность измерения сильно зависит от положения датчика Холла. Применение концентраторов поля приводит к увеличению напряжения Холла в несколько раз и даже в несколько десятков раз, но еще недостаточно защищает от отрицательного влияния внешних магнитных полей. Эту проблему решает только применение сердечника, охватывающего проводник с током. Главными достоинствами приборов на датчиках Холла, служащих для измерения силы тока, являются: a) возможность выполнения измерения без разрыва исследуемой цепи; б) отсутствие гальванической связи между входным и выходным сигналами; b) возможность исследования распределения тока; г) возможность изменения диапазона измерения, например, при помощи навивания большого числа витков на ярмо при малых измеряемых токах или разделение многожильного провода (так, чтобы магнитодвижущая сила возбуждалась только одной жилой) при больших токах; д) отсутствие обмоток, что дает большую динамическую устойчивость; 16-1401 241 0 ... 35363738394041 ... 57 |