
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 45678910 ... 15 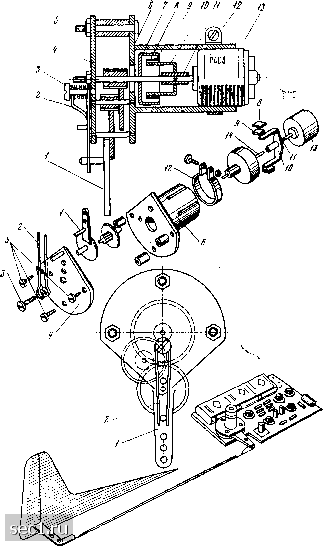 Рис. 11. Конструкция рулевой машинки с механическим возвратом в нейтраль. / - качалка; Р -возвратная пружина; 5 - винт для крепления возвратной-пружины; 4 - основание; 5 - винты для крепления рулевой машинки к плате; 5 - корпус; 7 - муфта сцепления; в - резиновая прокладка; Р - грузик; 10 - лепесток; - трубка; /2 - крепежное кольцо; /5 - микроэлектродвигатель; / -ось муфты. разметки сверлить совместно в основании 4 и корйусе 6, длй чего эти детали следует скрепить струбцинкой. Муфту 7 изготавливают из латуни и вместе с самой маленькой шестеренкой припаивают к оси муфты 14. Пружинный лепесток 10 изготавливают из тонкой латунной или бронзовой фольги. На концы лепестка 10 припаивают медные грузики, поверх которых для увеличения трения с поверхностью муфты 7 приклеивают кусочки резины. В отверстие лепестка 10 впаивают латунную трубку 11. При этом необходимо, чтобы при сборке трубка У/ плотно сидела на оси электродвигат-еля и не прокручивалась. Ось 14у наоборот, должна свободно вращаться в трубке 11. Возвратную пружину 2 изготовляют из стальной проволоки ОВС диаметром 0,8 мм. Она, воздействуя на палец качалки У, создает усилие, возвращающее механизм в нейтральное положение. Качалку / изготовляют из .листовой латуни или стали и припаивают к последней шестерне редуктора. Отверстия в качалке 1 служат для соединения с тягой руля модели. Микродвигатель 13 закрепляют в корпусе 6 крепежным кольцом 12, стягиваемым винтом с гайкой. В нерабочем состоянии лепесток 10 не касается внутренней поверхности муфты 7. Но как только электродвигатель начнет вращаться, под действием центробежной силы грузики 9 прижмутся к муфте 7, а резиновые прокладки обеспечат хорошее сцепление деталей. Редуктор придет в движение, и качалка 1, укрепленная на последней его шестеренке, отклонит руль модели. Когда микродвигатель остановится, грузики займут первоначальное положение, и возвратная пружина 2 вернет руль в нейтральное положение. При полном отклонении руля качалка своим пальцем упрется в край основания 4, при этом грузики 9 будут проскальзывать по поверхности муфты 7. Такой режим работы обеспечивает меньшее потребление тока электродвигателя по сравнению со случаем, когда его ось заторможена. Это позволяет питать приемное устройство от сравнительно маломощного источника напряжения, например гальванических элементов 316. Рулевую машинку крепят винтами 5 к куску тонкой фанеры вместе с платой приемника и источником питания, а затем устанавливают в модель. Такая система удобна для центровки модели и позволяет иметь хороший доступ к аппаратуре. После регулирования положения центра масс модели и закрепления аппаратуры рулевую машинку соединяют тягой с рулем поворота. Тягу изготовляют из липовой рейки сечением 5x5 мм, к ее концам нитками и клеем крепят крючки из проволоки ОВС диаметром I мм. ДВУХКАНАЛЬНДЯ АППАРАТУРА ПРОПОРЦИОНАЛЬНОГО УПРАВЛЕНИЯ МОДЕЛЯМИ Системы пропорционального управления моделями в последнее время завоевывают все большую популярность среди моделистов-конструкторов. Однако постройка и налаживание многоканальной аппаратуры пропорционального управления по силам только высококвалифицированным радиолюбителям. Аппаратуру можно значительно упростить, если, использовав основные принципы системы, сократить число каналов до одного-двух. Здесь приводится описание двухканальной аппаратуры пропорционального управления моделями. Описываемая двухканальная аппаратура может быть установлена на морских, сухопутных и летающих моделях. Любой из каналов может быть использован как для управления рулями модели, так и для управления тяговым электродвигателем. Основное преимущество пропорциональной системы перед дискретной состоит в том, что по командам оператора она позволяет отклонять рули модели на любой требуемый угол и плавно изменять частоту вращения тягового электродвигателя, причем возможно одновременное управление по обоим каналам. 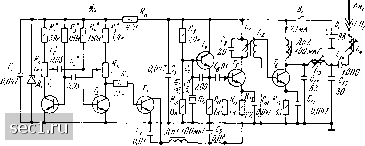 КС 156А тнтз/sd 5 кгзш тш ктзт ктзт ктбозб Рис. 12. Принципиальная схема передатчика двухканальной аппаратуры пропорционального управления моделями. В системе пропорционального управления командные сигналы содержат информацию о необходимом положении рулей, частоте и направлении вращения тягового двигателя, которая после расшифровки в специальном устройстве - дешифраторе сравнивае--с сигналами, поступающими от исполнительных механизмов -зультате сравнения получается сигнал рассогласование ..огорый после усиления используется для приведения в дейст двигателя исполнительного механизма. Воздействие сигнала р- .согласования таково, что исполнительный механизм принимает н.ьое положение (по углу поворота либо по частоте и направлению вращения), при котором сигнал рассогласования равен нулю. Это положение исполнительных механизмов пропорционально отклонению ручек управления. В аппаратуре использован принцип широтно-импульсной модуляции с независимым управлением длительностью импульса и паузы, чем обеспечивается возможность передачи информации по двум каналам. Аппаратура содержит передатчик, приемник супергетеродннно-го типа, дешифратор и два сервоусилителя. Один из сервоусилителей предназначен для работы с рулевой машинкой, другой -с тяговым электродвигателем модели. Передатчик. Принципиальная схема передатчика показана на рнс. 12. Выходная мощность передатчика около 150 мВт, что поаво-ляет управлять моделью в радиусе действия несколько сотен метров, 0 ... 45678910 ... 15 |