
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 891011121314 ... 48 2. ДИАГНОСТИРОВАНИЕ БЕЗ ВОССТАНОВЛЕНИЯ Выбор модели взаимодействия элементов в процессе проверки системы предопределяет в значительной степени сложность реализации и основные характеристики алгоритмов диагностирования (их быстродействие, занимаемый объем памяти, возможности структуризации и т. п.). Поэтому при разработке отказоустойчивых систем естественным является стремление к использованию наиболее простых моделей, в которых функциональные особенности элементов системы не играют существенной роли при анализе технического состояния системы в целом. Такой подход позволяет создавать достаточно универсальные алгоритмы и программы диагностирования и контроля, применимые для широкого класса реальных систем. Это послужило одной из основных причин широкого распространения Р-моделей взаимодействия, которые достаточно просто и полно описывают диагностирование в многомашинных распределенных системах, построенных на основе микро-ЭВМ и микропроцессоров. Действительно, при достаточно надежных связях между элементами системы каждый из них может устанавливать связи с другими элементами и подавать на них тесты. Получаемый при проверке результат выполнения теста анализируется контролирующим элементом и принимается решение об исправности. Примером одного из простейших способов такого тестирования является проверка отклика контролируемого элемента по запросу контролирующего элемента с использованием таймера, который входит во многие современные ЭВМ. Поэтому основное внимание при рассмотрении диагностирования без восстановления уделяется СВК, в которых взаимодействия элементов описываются Р-моделями. Будем называть такие структуры Р-структурами. Обозначим через (Vi) = {v,- Ч(и,-, Vi)V, VjVt], т. е. множество вершин Vj, соответствующих элементам, контролирующим элемент v. Теорема 1 [44]. Пусть диагностируемая система S описывается Р-структурой для множества V элементов ( У = п) таких, что для любого (у,, v)E, о,-, VjV, п(/. дЕ. Система S является /-ДС без восстановления тогда и только тогда, когда Vy.-gV, Г"(у,)>. Данная теорема позволяет определять ДС без восстановления по структурным свойствам графа G - G {V, Е). Используемое в теореме 1 предположение об отсутствии взаимонаправленных связей, т. е. одновременном наличии в Р-структуре связей (у,., v,)QE, [Vj, vQE, v,, Vj£V, ограничивает класс рассматриваемых реальных систем. Во многих существующих микропроцессорных системах, построенных на основе микро-ЗВМ, обычно в процессе функционирования предусматривается возможность выбора в качестве ведущих произвольных микро-ЭВМ. Выбранные микро-ЭВМ могут применяться в качестве контролирующих элементов, причем выбор ведомых микро-ЭВМ, выполняющих функции контролируемых элементов, производится ведущей с использованием схем арбитража и данных о необходимой структурной организации t-RC. Следовательно, для многих реальных микропроцессорных систем естественным является предположение о наличии двунаправленных связей, т. е. связей {Vf, Vj)£E, (Vi, v,)£E, Vi, Основные требования к структурной организации таких систем, обеспечивающей их /-диаг-ностируемость, вытекают из следующей теоремы 44]. Теорема 2. Пусть система S описывается Р-структурой. Система S является /-диагностируемой тогда и только тогда, когда выполняются следующие условия: 1) п> 2/ -fl; 2) Уу,- е V, Г-1 (о,) > /; 3) для каждого О < p<it и каждого XczV \Х \ =п - -2t + p, \ГХ\>р, где rX = [vi](v,. Vj)£E, v,X, £V\X). Теорема 2 позволяет оценить при заданном количестве элементов п наибольшее количество неисправных элементов /, при котором возможно однозначное определение неисправных элементов в системе. Действительно, непосредственно из условия 1 теоремы 2 следует, что L.(tt- 1)/2 J, где через [ х J обозначено наибольшее натуральное число, не большее х. Так, например, система, представленная ДГ на рис. 13, является 1-диагностируемой и 2-дкагностируемой без восстановления. Анализ Р-структур на основе теорем 1 и 2 позволяет оценить /-ДС для заданных значений / и разбиений системы на инцидентные подмножества элементов. Однако в ряде случаев, используя данные об архитектурных особенностях построения 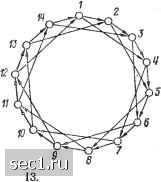 Рис. Диагностируемая система системы, удается определить подмножества направленных путей в ДГ системы или оценить связность элементов системы, обеспечиваемую через подмножества других элементов. Наличие таких данных позволяет оценить потенциальные возможности диагностирования в рассматриваемых системах. Предположим, что ДГ G являегся сильно связным графом, т. е. для любой пары элементов Vi, Vj £ V существует направленный путь связей из одной верщины к другой. Связностью k (G) направленного графа G называется минимальное число вершин ДГ, исключение любой из которых приводит к несвязности графа G. Тогда для Р-структур справедливы следующие два следствия к теореме 2 [44, 51]. Следствие 1. Пусть G = G (У, Е) есть ДГ Р-структуры системы S, состоящей из п элементов, п = \V\. Тогда, если k (G)>- t к п >-2t + 1, то S является -ДС. Следствие 2. Система S, представленная ДГ G =-- G {V, Е), л = I 1/1, является -диагностируемой, если связь между вершинами с номерами / и / удовлетворяет соотношению / - i = = Ьт (mod n),m=l,2, ипиб представляют собой взаимно npocTiiie числа. Результаты следствия 2 удобно использовать для построения симметричных диaгнocтиpyeмыx Р-структур. Оценку диагностических возможностей ДГ можно производить на основе отображения множеств элементов на область натуральных чисел. Обозначим Р множество всех разбиений множества элементов V системы S на три непересекающихся подмножества (X, Y, Z), удовлетворяющих следующим условиям: 1) \Z\>\; 2) TXY; TX[v vV, HXeA::(x. v)E] - X; 3) T-Z = {v\vV, gzeZ:(y, z)E]-Z; 4) V==X\]Y\]Z. Пусть К есть функция из множества Р разбиений р на множество натуральных чисел такое, что УрР: K{p)==\Y\ + \\Z\/2]. Тогда условие f-диагностируемости без восстановления имеет следующий вид. Лемма 1 [36]. Система S является -диагностируемой тогда и только тогда, когда у/? £ Я : /С (р) > t. В тех случаях, когда известно минимальное значение К (р), представляется возможным непосредственное определение -ДС. Это значение может быть задано в процессе проектирования отказоустойчивой системы нли получено в процессе перестройки структуры системы. 0 ... 891011121314 ... 48 |