
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0123456 ... 48 решения ММС Связи 3 между ММС и ВМ, в.который входит процессор П, позволяет производить обмен в рамках интерфейса 2к. Основное преимущество системы МИНИМАКС состоит в гибкой перестройке двумерных структур с общей одномерной связью между ЭМ. Исключение из системы или введение в систему ЭМ осуществляется подстройкой (программированием) соответствующих ММС без изменения всей структуры связей в целом. Вместе с тем подключение большого количества ЭМ данного типа по общей шине экономически неоправдано и затруднительно, поскольку требует дополнительной доработки аппаратуры сопряжения и интерфейса. В этом отноше- ЙЗщот шина системы Единая шина ВМ оп\ \ву1 ...mi6 дикая \шина ВМ Единая \шина ВМ Рис. 4. исщая структура системы «Статистик-10» НИИ существенный выигрыш достигается за счет применения МП и микро-ЭВМ. На основе отечественных высокопроизводительных микро-ЭВМ (в частности, «Электроника К1-20», «Электроника-80») можно создавать достаточно простые многомашинные системы обработки информации с большим количеством ЭМ. Примером может служить система «Статистик-10» (рис. 4), предназначенная для автоматизации решения задач учета, планирования и управления. Элементами нижнего уровня системы являются элементарные машины ЭМ1.....ЭМ5, объединяемые через общую шину в подсистему более высокого уровня с помощью системных устройств СУ. Элементарная машина включает микро-ЭВМ «Электроника-60», в которую входят микропроцессор МП, оперативная память ОП и внешние устройства ВУ1, ВУ16, объединенные общей шиной. В систему можно подключать до 15 ЭМ, причем исключается ЭМ переводом соответствующих выходов в третье состояние (высокое сопротивление). Это позволяет достаточно просто наращивать вычислительную мощность и исключать неисправные ЭМ из системы. Более широкими возможностями структурной организации обладает созданная в СССР микропроцессорная однородная система МИКРОС [161. Основное отличие этой системы от предшествующих состоит в возможности свободной реконфигурации с помощью модуля системного устройства (МСУ), обеспечивающего связь каждой ЭМ с другими ЭМ, количество которых может быть от 1 до 12. Модуль системного устройства, структура которого показана на рис. 5, служит для выполнения операций приема и передачи данных, приема слова состояния по одному из каналов. Для этих операций исполь- К соседней ЗМ Стык 2 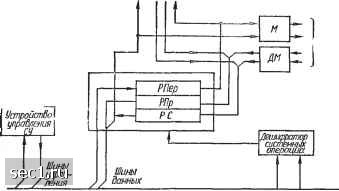 К аппаратуре -передачи данных Тактирование СУ 1 Рис. 5. Модуль системного устройства зуется регистр передачи РПер, регистр приема РПр, регистр слова состояния PC, модулятор М и демодулятор ДМ под управлением Устройства управления СУ. Модулятор и демодулятор служат для преобразования данных из параллельного в последовательный код и наоборот, а также для синхронизации сигналов прием-передача данных и прерываний микро-ЭВМ. Взаимодействуют ЭМ между собой под управлением операционной системы, основой которой является программное ядро ЭМ, обеспечивающее загрузку программ и данных, мультипрограммную работу и реализацию алгоритмов системных взаимодействий. Такая организация обеспечивает полное использование ЭМ, и как следствие, высокую производительность системы. В системе МИКРОС, таким образом, достигается гибкое распределение вычислительной мощности и занятости ЭМ при одновременном расширении возможностей реконфигурации. При использовании систем МИНИМАКС и МИКРОС возможны различные структуры связей ЭМ, однако стремятся вы- бирать наиболее простые. Так, например, если можно разделить процесс вычисления на последовательные этапы, каждый из которых выполняет одна ЭМ, то структура системы в простейшем случае представляет собой последовательно связанные между собой ЭМ (система конвейерного типа). Однако при отказе одной из ЭМ происходит останов системы. Поэтому с точки зрения обеспечения отказоустойчивости целесообразно использовать максимальное количество связей между машинами. В результате ЭМ, свободные от вычислений в данный момент, могут проверять другие свободные машины или участвовать в поиске дефектов в ЭМ. Таким образом, выбор структурной организации связей между компонентами многомашинной системы в значительной степени предопределяет не только организацию физических и логических связей в системе, распределение вычислительной мощности и памяти на этапе проектирования, но и отказоустойчивость систьл1ы в процессе эксплуатации. С точки зрения унификации программного обеспечения и упрощения обслуживания целесообразно, чтобы структура многомашинной системы была симметричной. Вместе с тем особенности обслуживаемого объекта (неравная удаленность и необходимая пропускная способность между отдельными ЭМ, различие выполняемых ЭМ функций, обусловленное, например, структурой обработки данных), разные типы используемых ЭМ и другие факторы требуют е ряде случаев использования систем с несимметричной, нерегулярной структурой связей. Опыт разработки многомашинных систем позволил выделить типы систем для практического использования. На рис. бив табл. 1 на основе данных [5, 8J, показаны основные типы многомашинных систем с различной структурной организацией, а также их наиболее важные качественные и эксплуатационные характеристики. В дальнейшем обозначения структурной организации системы, приведенные в табл. 1, будут использованы в качестве типа системы (например, система С7 - система, имеющая архитектурную организацию «глобальная шина»). Потенциальная производительность большинства из перечисленных типов систем составляет 1-3 Мбит/с, причем часть систем эксплуатируется. Показанные на рис. 6 системы неравноценны с точки зрения обеспечения их отказоустойчивости. Так, например, в системе со звездообразной организащей связей между ЭМ (система С8) отказ переключателя приводит к полному отказу системы. Отказ одной ЭМ в большинстве приведенных систем не приводит к отказу системы в целом. Однако ввиду различи- 0123456 ... 48 |