
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 567891011 ... 48 Восстановление триад модулей памяти происходит аналогичным образом за исключением лишь того, что при переключениях необходимо учитывать адресное пространство этих модулей и заложенные функции (особенно для ПЗУ). При отказе ПЗУ допускается использование ЗУПВ, в которые производится предварительная загрузка содержимого исправных модулей. Инициализация с перестроенной триады производится под управлением триад, выполняющих системные программы с привлечением БЗШ. В системе дополнительно предусмотрено ограничение области распространения неисправностей, защиты цепей синхронизации модулей и наличие аккумуляторов питания для защиты содержимого ЗУ при отключении питания. Результаты проверки системы FTMR показали значительное влияние длительности перемежающихся отказов на вероятность безотказной работы системы, недостаточную эффективность БЗШ и ВИШ. В системе SIFT программный контроль осуществляется с помощью общих и локальных исполнительных программ [8]. Локальные исполнительные программы входят в состав каждого модуля обработки данных и включают подпрограммы голосования, обработки ошибок, сопряжения буферов, а также подпрограммы-планировщики. Локальные программы обеспечивают данные для общей исполнительной программы, которая по этапам осуществляет реконфигурацию системы. Подпрограмма голосования производит обработку голосованием не менее чем троекратно результатов вычислений, полученных от других процессоров. При наличии ошибок фиксируется ошибка данных от соответствующих процессоров. При наличии ошибок подпрограмма обработки ошибок формирует таблицу ошибок процессор/шина для каждого процессора, в которую заносится количество ошибок при обращении данного процессора к другим процессорам через различные шины. Таблица ошибок передается программе составления таблицы ошибок и общей исполнительной программе, которая обеспечивает реконфигурацию системы через программу локальной реконфигурации. Микро-ЭВМ позволили создавать многомашинные мулыи-микропроцессорные системы типов, близких С2, С4, Сб. Примером такой частично сетевой кольцевой системы служит базовая отказоустойчивая система BFS, описанная в работе [54]. Система содержит несколько микро-ЭВМ, каждая из которых связана с соседними микро-ЭВМ, кроме одной. Принцип построения системы показан на рис. 10. Коммутаторы S обеспечивают связь вычислительной части с периферийными устройствами: дисплеями DS и устройством печати ПТ. Два элемента Ml и М2 имеют связь с накопителями на диске да и ДС2. Каждый из элементов Mi системы содержит центральный процессорный элемент на микропроцессоре 8086,-локальное ОЗУ объемом 32 Кбайт и ПЗУ объемом 16 Кбайт со средствами обнаружения и корректировки ошибок; двунаправленный порт ОЗУ на 16 К и процессор связи, обеспечивающий связь с 4 портами ввода-вывода и последовательную передачу данных. В системе отсутствует общий супервизор, поэтому каждый из элементов может автономно использовать свои ресурсы и интерфейс. Кроме того, для повышения эффективности обмена центральный процессорный элемент и процессор связи разделены. Это обеспечивает связь от элемента к элементу и возможность создания локальных сетей из мнк-ро-ЭВМ. Система связи представляет собой 12 независимых дуплексных каналов. При этом обмен данными между процессорами связи и процессорным элементом зависит от прерываний по состоянию буфера канала. Структурно программное обеспечение системы BFS подразделяется на функционально независимые части, которые выполняются в соответствии с иерархической подчиненностью и резервируются. В частности, они обеспечивают постоянно работоспособное ядро в каждом модуле Mi, имеют стандартный формат обмена, позволяют производить обработку избыточных таблиц и реализацию избыточных функций. Выполняемые программным обеспечением функции зависят от прерываний и стратегии реконфигурации с плавной деградацией. Общее управление системы обеспечивает самопроверку и передачу элементов своего состояния соседним элементам с целью реконфигурации и автоматического восстановления системы. Таким образом, в системе предполагается эффективное средство отказоустойчивости. В ряде современных бортовых систем часто используют распределенные сетевые или иерархические структуры систем, в которых ЭМ обладают повышенной надежностью. Реализация таких машин на сверхбольших интегральных схемах в виде самопроверяемых вычислительных модулей 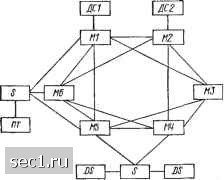 Рис. 10. Структура системы BFS (СВМ) системы STAR описана в работе 127]. Структура СЕМ показана на рис. И. Обмен каждого СВМ с другими модулями идет через адаптеры шины АШ и контроллер шины КШ программируемого стандартного блока сопряжения с шиной СШ- СБ. Самопроверяемый вычислительный модуль имеет внутреннюю избыточную память, соединенную с внутренней шиной Внеити шина СШ-СБ Г-------1 flpuofumemme сигналы " распределения шины Внутренняя шина Запрет ПДП Изьттной память с СП-СБ Прерывание т коррекции В коде Хэнминга исшойстВо процес. Арбитра» по шине Ч-СБ 3-СБ Расширение ПАП \ Возврат виогоИное состояние Рис. П. Упрощенная структура схемы СВМ через стандартный блок сопряжения с памятью СП-СБ, обнаруживающий и корректирующий ошибки, а также центральный стандартный блок (ЦСБ), включающий два центральных процессора ЦП, стандартные блоки ввода-вывода ВВ-СБ, соединенные между собой внутренней шиной. Блоки СП-СБ и СШ-СБ обеспечивают контроль входящих в них схем путем сравнения результатов выполнения одинаковых функций на двух процессорах ЦП. 0 ... 567891011 ... 48 |