
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 24252627282930 ... 39 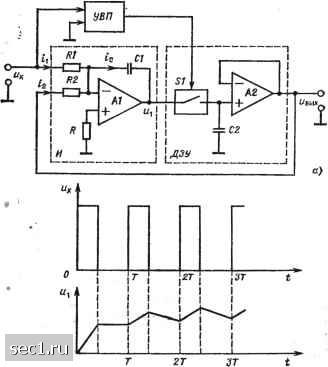 Рис. 3,8. Итерационный преобразователь напряжения (а) и диаграмма напряжений (б) Из (3.11) вытекает, что (3.12) т. е. выходное напряжение преобразователя пропорционально усиленному в RijRi раз значению входного сигнала, усредненного за время Т. Переходной процесс в итерационном преобразователе описывается выражением [69, 70]: Ивых.р[п] = {iMBx/i-f «вых[01} (l-yfer/T2)", (3.13) где п - число циклов работы преобразователя; Мбых.р[п] =Ивых[п]-«вых.у -составляющая выходного напряжения, харак-84 Ктеризующая переходный процесс, после окончания л-го цикла ра-•боты; «вых[«]-выходное напряжение преобразователя после окончания п-го цикла работы; Ывых[0]-выходное напряжение преобразователя перед началом первого цикла; k - коэффициент передачи ДЗУ; X2-R2C1 - постоянная времени интегратора по цепи ООС. Характер и длительность переходного процесса зависят от сомножителя (I-йГ/тг). Преобразователь устойчив, если выполняется неравенство 1-АГ/Т2<1. (3.14) Переходный процесс в преобразователе имеет апериодический характер, когда кТ/%2<.\; если же 1<йГ/т2<2, то характер переходного процесса колебательный. Характеристикой переходного процесса итерационного преобразователя может служить время установления 1п=щТ, где % -число циклов работы преобразователя, необходимое для Р установления выходного напряжения с относительной погрешностью установления у. В. соответствии с (3.13) необходимое число циклов % находят из соотношения (1-/гГ/.,)«т<у. Поскольку п может принимать лишь целочисленные значения, получим Следовательно, „.,.= ent(--Wl. -).1 , . Т. (3.15) 1п 1-ДгГ/Тг! } \ Графики зависимости tn/x2=F(%2/kT) приведены на рис. 3.9 для двух значений погрешности установления (у=0,01 и р= =0,001). При выполнении неравенства \1~-кТ/х2\у время установления преобразователя равно одному циклу работы. Из рисунка видно, что уменьшение длительности цикла работы Т при X2l{kT)>\ приводит к увеличению времени переходного процесса до величины „=4,6т2 при =0,01 или до г;„=6,9т2 при у= =0,"001. При %s./(kT)<i\ с увеличением длительности цикла Т время установления выходного напряжения резко возрастает и достигает значений „=4,6т2 при у=0,01 и tn=b,9t2 при у- =0,001 уже при кТ=\,2%2. Как следует из (3.12), вариации емкости интегрирующего конденсатора С/ и коэффициента передачи к динамического запоминающего устройства не влияют на статическую точность ите- . рационного преобразователя. Однако из (3.14) и (3.15) видно, что изменение параметров преобразователя С1 и к влияет на ха-
; . / Рис. 3.9. График зависимости Ы%<~Е KJkT) \ • рактер его переходного процесса и может привести к потери уотойаивости, поэтому значительные измененияэтих параметров нежелательны.- . • Одним из основных источников йогрёшностей преобразователя, изображенного на рис. 3.8,а, квйяется время замыкания ключа S1. Как показано в [71],- эта погрешность может быть полностью устранена за счет небольшого усложнения схемы. Итерационные усредняющие устройства успешно применйют в качестве быстродействующего ФНЧ. Выходной сигнал такого фильтра, предназначенного для подавления пульсаций в диапазоне частот, превышающих некоторое значение частоты -0,85/о (где fo=l/R2Ci), будет устанавливаться с погрешностью Y=0,001 за время tn равное 6,9 в=5,9 н, например, при 1»= - 2 Гц, „=2,9 с. Для сравнения укажем, что идеальный RC-фильтр нижних частот третьего порядка, т. е. фильтр, в котором устранено влияние последующих звеньев на предыдущие,-обес-печ{1вающий коэффициент фильтрации не менее 1G00 в диапазоне частот [н/<оо имеет время установления ty=l7,9/fH,&RC-фильтр Десятого порядка ty=7,3/fti. - - . * 3.5. Уфедн1зк$щие устройства ha угравлйемьзх интеграторах Отличительная особенность усредняющих устройств на управляемых ; интеграторах заключается в высоком быстродействии. ! В зависимости от способа интегрирования усредняющие устройства подразделяют на цифровые и аналоговые. Цифровые интеграторы. Усредняющие устройства на Основе цифрового интегрирования представляют собой один из наиболее распространенных вариантов цифровых фильтров. При цифровом интегрировании вместо точного интегрирования непрерывной функции используют ее приближенное численное интегрирование. За время, равное периоду Т входного напряжения Ux, п раз из-86 0 ... 24252627282930 ... 39 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||