
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0123456 ... 49 и ШИМ; слежения за эталонным синусоидальным напряжением. Важными критериями выявления преимущества каждого способа формирования выходного напряжения являются возможность регулирования частоты и напряжения на выходе преобразователя при хорошем качестве энергии и простота осуществления искусственной коммутации тиристоров. Способ широтно-импульсного регулирования до недавнего времени сравнительно мало применялся в автономных инверторах. Большее распространение получил способ ШР1М, так как он обеспечивает хорошую форму выходного тока при плавной регулировке частоты и напряжения в широких пределах. Однако при этом способе производится большое число переключений, что приводит к дополнительным потерям в силовой схеме. При способе ШИР число переключений можно существенно снизить, а эффективность его применения, например, для регулирования частоты вращения двигателя можно сделать достаточно высокой, несмотря на некоторое ухудшение формы выходного тока преобразователей [8, 18, 30, 39]. Кроме того, для реализации способа ШИР не требуется наличие в каждой фазе ПЧ отдельного узла коммутации. Для этого вполне достаточно иметь общий для всех фаз узел коммутации, что упрощает его схему. При использовании ШИР на выходе ПЧ в простейшем случае формируются напряжения ступенчатой формы (рис. 10, а). Здесь и ниже эпюры напряжений для простоты показаны без учета пульсаций выпрямленного напряжения. В процессе регулирования ширина ступенек уменьшается и между ними появляются паузы (рис. 10, б), что и приводит к изменению величины напряжения. Такой способ называется однополярным ШИР. Во время пауз при однополярном ШИР напряжение отсутствует, а нагрузка замкнута накоротко. При двухполярном способе ШИР во время паузы напряжение изменяет полярность, оставаясь неизменным по величине (рис. 11). Ширина пауз зависит от глубины регулирования и определяется углом регулирования а, а их число за период Т„ = = 1 н выходного напряжения - кратностью частоты модуляции, т. е. отношением k = TJT = fjf, где Т, = = \lf - период модуляции. Приведенной на рис. 10, б кривой, соответствует значение Л = 6. Общепринятый способ формирования выходного напряжения с k=2m, гдет - число фаз на выходе ПЧ. При этом в спектре отсутствуют гармоники, кратные 3; спектр содержит гармоники с частотами (6s ± 1)/н, где S = 1, 2, 3, амплитуды гармоник зависят от угла регулирования. При изменении угла регулирования частотный спектр остается неизменным; изменяются лишь амплитуды гармонических составляющих. Регулируемое напряжение представляет последовательность импульсов, чередующихся с паузами (рис. 10, б-г). Рис. 10. Форма кривой выходного напряжения НПЧ при однополярном способе ШИР без регулирования выходного напряжения (а) и с регулированием выходного напряжения при кратности модуляции k =6 (б), k= 12 (в) и = 18 (г)
Рис. 11. Форма кривой выходного напряжения НПЧ при двухполяр-ном способе ШИР
С изменением частоты выходного напряжения /„ при постоянстве длительности этих импульсов выполняется соотношение = const, что бывает необходимо в частотно-регулируемом электроприводе переменного тока. Кривая выходного напряжения с k = 6 соответствует режиму питания электродвигателя переменного тока при номинальной частоте. Однако со снижением частоты пропорциональное увеличение пауз приводит к столь значительным искажениям напряжения, что нормальная работа двигателя становится невозможной. Для устранения этого недостататка с целью улучшения формы тока в двигателе на низких частотах увеличивают кратность частоты модуляции k в целое число раз л, доводя ее до значений k = 12 (рис. 10, в), k = 18 (рис. 10, г), Л = 24 и т. д. Требуемая кратность тем больше, чем глубже обеспечиваемый при ШИР диапазон регулирования скорости двигателя. При изменении кратности часто-Tbi модуляции частотный спектр остается также постоянным. Однако с увеличением k растет порядок гармоник с наибольшими амплитудами. Максимальными амплитудами характеризуются гармоники с частотами (6ц ± 1) /„ при одно-полярном и (6 • 2л + 1) /„ при двухполярном ШИР. Графики зависимости амплитуд гармоник напряжения от угла регулирования при ц = 1 и р. = 2 при однополярном способе ШИР показаны на рис. 12, а, б и при двухполярном способе ШИР - на рис. 12, в, г [40]. 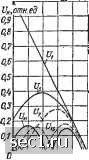 1г « зе is.А° о  П IS 2Ш/2, Б
 Рис. 12. Кривые зависимости амплитуд гармонических составляющих выходного напряжен собе ШИР для (1 = 1 ц= 1(е)и(х=2(е) выходного напряжения от угла регулирования а при однополярном способе ШИР для (1 = 1 (я), (I = 2 (б) и двухполярном способе ШИР для Таким образом, за счет увеличения кратности частоты модуляции, т. е. изменения структуры кривой напряжения, при регулировании удается снизить амплитуды 5, 7, И, 13-й и других гармоник до приемлемых величин и обеспечить этим требуемое качество энергии на выходе ПЧ. Однако при таких изменениях усложняется система управления ПЧ, при этом предъявляются дополнительные требования к его узлу коммутации, связанные с увеличением частоты коммутации. Одним из основных узлов системы управления НПЧ такого типа является генератор управления (ГУ), пример структурной схемы которого показан на рис. 13 [8]. Генератор управления предназначен для формирования последовательностей импульсов, необходимых для запуска СУ преобразователя, определения моментов изменения их структуры и выдачи необходимых команд. Он состоит из формирователя переключения структур ФПС: формирова- 0123456 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||