
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 81828384858687 ... 159 DTR- RTS Gnd Vcc 0 1 мкф стабилизаторов. Обеспечивать питание целесообразно через управляющие линии интерфейса RS-232 (рис. 8.28). При посылке на линии DTR и RTS логических О на них появляются положительные напряжения. Стабилизаторы понижают это напряжение до уровня, необходимого для питания микроконтроллера (может обеспечиваться ток до 5 мА). Для получения больших токов к схеме разрешается подключить линию передачи данных (ТХ). Компьютер при этом должен инициировать формирование выходного сигнала напряжения с положительной полярностью. Тока в 5 мА вполне достаточно как для питания транзисторно-резисторной схемы передатчика интерфейса RS-232, так и Р1С-мик-роконтроллера, тактируемого частотой 4 МГц, с подключенными к нему дополнительными схемами, например жидкокристаллическим дисплеем. /7777 Рис. 8.28 Питание микроконтроллерных уаройав от линий интерфейса RS-232 ИНТЕРФЕЙСЫ RS-485/RS-422 Интерфейсы RS-485/RS-422 соответствуют требованиям стандартов, регламентирующих последовательную передачу данных по дифференциальным (парафазным) линиям. Для передачи используются сбалансированные парафазные драйверы, а в качестве приемников могут выступать компараторы напряжений. Схема дифференциальной линии передачи показана на рис. 8.29. Чтобы уменьшить влияние переменноточных наводок на работу линии, целесообразно использовать витые пары, в которых провода Драйвер Сигнал положительной полярности Сигнал отрицательной полярности Рис. 8.29 Схема передачи данных по дифференциальной линии  Приемник бифилярно скручены. Витую пару можно приобрести у соответствующих поставщиков либо изготовить самостоятельно, просто скру. тив отдельные проводники; при этом витая пара должна иметь характеристическое (волновое) сопротивление, равное 75 Ом или более. Одним из стандартов, регламентирующих передачу данных по дифференциальной линии, является RS-422. Этот стандарт, для поддержки которого разработано большое количество микросхем, обеспечивает: ♦ передачу данных к нескольким приемникам; ♦ максимальную скорость передачи данных до 10 Мбит/с; ♦ длину линии передачи до 4000 м (при скорости 100 Кбод). Режим работы с большим числом приемников проиллюстрирован на рис. 8.30. Максимальные расстояние передачи и скорость передачи данных в подобной схеме зависят от числа приемников и суммарной длины линий. Так, максимальное расстояние передачи соответствует 4000 м для частоты 100 кГц и всего 40 м для частоты 10 МГц: эти примеры являются весьма наглядными и позволяют проследить взаимосвязь между вышеупомянутыми параметрами схе мы. В ряде случаев при больших расстояниях приходится использовать согласующий резистор с сопротивлением в несколько сотен ом, который устанавливается между положительным и отрицательным проводниками в конце линии передачи. Это позволяет свести к минимуму эффекты отражения смгиалаприемником, а следовательно, и влияние других приемников. Драйвер
  Рис. 8.30 Использование интерфейса RS-422 для передачи данных на несколько приемников Интерфейс RS-485 во многом аналогичен интерфейсу RS-422, за тем лишь исключением, что он допускает работу сети с множеством передатчиков. Типовая микросхема для этого интерфейса - 75176, которая, как показано на рис. 8.31, обеспечивает возможность передачи и приема данных. 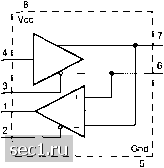  Рис. 8.31 Схема использования микросхемы 75176 в интерфейсе RS-485 При реализации соединений по интерфейсам RS-485/RS-422 необходимо тщательно проверять полярность подключения линий и выводов микросхем: при некорректном соединении возможна потеря сигналов и данных. ПОДПРОГРАММЫ ДЛЯ ПОСЛЕДОВАТЕЛЬНОГО АСИНХРОННОГО ОБМЕНА Первая макрокоманда предназначена для микроконтроллеров младшего и среднего подсемейств. Она записывается в виде: NRZSerialNI TXPort, TXPin, RXPort, RXPin, Polarity, Rate. Freq, где параметры TXPort и TXPin, a также RXPort и RXPin служат для задания вывода передачи данных и вывода приема данных соответственно. Как будет показано в следующем разделе, эти выводы могут совмещаться в один, что позволяет заметно упростить процедуру. Параметр Polarity, задающий полярность сигналов, определяется как Роз (для положительной логики) или Neg (для отрицательной). В случае отрицательной логики микроконтроллер может непосредственно подключаться к интерфейсу RS-232 через токоограничиваю-щиерезисторы. С помощью параметра Rate задается скорость передачи 0 ... 81828384858687 ... 159 |
|||||||||||