
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 86878889909192 ... 159 0.1 мкФ Танталовый 4 МГц , Gnd Ш7
0 1 мкф , Танталовый Рис. 8.34 Схема измерения сопротивлений переводится в режим выхода. После завершения операции заряда режим этого вывода изменяется на режим входа данных, а конденсатору предоставляется возможность разрядиться через потенциометр. На осциллограмме (рис. 8.35) четко прослеживаются два временных интервала: цикл заряда и цикл разряда.
Рис. 8.35 Осциплограмма напряжений на резиаоре Время заряда конденсатора определяется по формуле: Время заряда = R х С х In (Uend/Ustart), где величины Ustart и Uend соответствуют начальному и конечному «оовням напряжения. Поскольку емкость конденсатора (С), началь-нЫЙуровень напряжения и время заряда известны, эта формула мо-jjjeT быть приведена к виду, удобному для определения величины сопротивления R: R= временной интервал/(С х In (Uend/Ustart)). Программа для управления процессом измерения представлена ниже: int PotRead ( ) Измерение сопротивления int 1 TRIS Pin = for ( TRIS THRO while retu r Pin = Output, 1, 1=0, i<5mkc), Pin = Input, = 0, (Pin == 1), n TMRO, Назначение вывода как выхода Выдача 1 для заряда емкости Определение как входа и-удержание до полного разряда емкости через потенциометр Значение таймера равно времени разряда Окончание СХЕМЫ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ На практике для того, чтобы задать направление вращения двигателя, может использоваться набор простых переключателей (в том числе и транзисторных ключей). Часто управление двигателем производится с помощью мостовой схемы, которая показана на рис. 8.36. При размыкании всех переключателей этой схемы электрический ток не б)Дет протекать по обмоткам двигателя, асам двигатель не будет вращаться. При замыкании переключателей 1 и 4 дви-"атель начинает вращаться в одном направлении, а при замыкании переключателей 2 и 3 - в другом. Ни при каких обстоятельствах не следует одновре-енно замыкать оба переклдочателя * Одном плече моста, поскольку это может 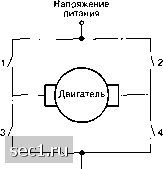 /Ш Рис. 8.36 Схема управления двигателем привести к выходу из строя источника Питания или перегоранию соответствующего плавкого предохранителя вследствие короткого замыкания. Регулирование скорости вращения двигателя обычно обеспечивается посредством формирования управляющих импульсов в виде сигналов с широтно-импульсной модуляцией (Pulse-Wave Modulation), как это показано на рис. 8.37. Подобный подход позволяет регулировать среднюю величину мощности, поступающей на двигатель. В данном случае чем больше величина отношения «длительность импульса/период», тем большая мощность поступает на двигатель. Длительность импульса Период Рис. 8.37 Временная диаграмма сигнала с широтно-импульсной модуляцией Частота сигнала с широтно-импульсной модуляцией должна превышать 20 кГц, что позволяет исключить звуковые эффекты, связанные с формированием звуковых сигналов самим двигателем при изменении образующегося в нем магнитного поля. Микросхема типа 293D (рис. 8.38) обеспечивает управление двумя двигателями (по одному с каждой стороны робота), подключенными к выходам соответствующих буферных элементов (выводы 3, 6, 11 и 14). При этом выводы 2, 7, 10 и 15 используются для управления уровнями напряжения (фактически для управления переключателями вышеописанной мостовой схемы), формируемыми на вько-дах буферных элементов. Выводы 1 и 9 также применяются для управления и отвечают за активизацию различных буферных элементов. Именно на эти выводы могут подаваться сигналы управления с широтно-импульсной модуляцией, которые регулируют скорость вращения двигателей. Величина напряжения для питания различных логических устройств внутри микросхемы составляет +5 В. Напряжение питания двигателя - в пределах от 4,5 до 36 Б. Максимальная величина тока для двигателей не должна превышать 500 мА. На выходах микросхема 293D имеет защитные шунтирующие 0 ... 86878889909192 ... 159 |