
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 87888990919293 ... 159 Микроконтроллер 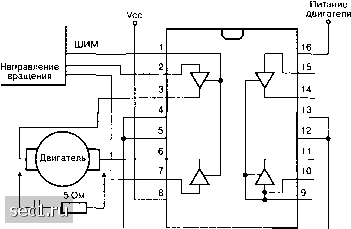 0.1 мкФ Демпфирующая цепь Рис. 8.38 Схема подключения двигателя к микросхеме 293D диодм. Последнее означает, что при подключении двигателя к микросхеме 293D внешние защитные диоды не требуются. На рис. 8.38 показана также демпфирующая цепочка, состоящая из резистора (сопротивлением 5 Ом и допустимой мощностью рассеяния 2 Вт) и конденсатора (емкостью 0,1 мкФ). Она подключается квыводам щеток двигателя и позволяет уменьшить уровень электромагнитного излуче-ниян импульсных радиопомех, создаваемых двигателем. Она же сглаживает влияние сбоев микроконтроллера на работу двигателей. Следует напомнить, что ИС 293D и 298 используют на выходах биполярные транзисторы, поэтому падение напряжения на каждом выходном ключе составляет около 0,7 В (для двух ключей-1,4-1,5 В, см. рис. 8.38). Это падение напряжения и выходной токявляются весьма важными показателями для определения мощности, рассеиваемой микросхемой управления. Для микросхемы 293D величина выходного тока обычно ограничивается на уровне 1 А, а для микросхемы 298 этот предельный показатель соответствует 3 А. Поэтому, чтобы улучшить тепловые режимы работы указанных микросхем, может потребоваться установка радиатора для эффективного отвода тепла. Для решения проблем, связанных с нагревом микросхем и потерями мощности в мостовой схеме управления двигателями, применяются мощные полевые (МОП) транзисторы. Можно заметно упростить программы, если вместо двигателей по. стоянного тока использовать шаговые двигатели, способные дискретно (пошагово) поворачиваться или вращаться с постоянной скоростью (с последовательным периодическим повторением шагов). Схемы управления шаговыми двигателями несколько более сложны и требуют больших токов управления, однако эти недостатки полностью нивелируются за счет заметного упрощения программ управления. Шаговые двигатели (двухполюсные) вместо ротора имеют постоянный магнит Угловое положение ротора двигателя контролируется с помощью пары электрических обмоток. Для поворота двигателя на его обмотки подаются управляющие сигналы, вызывающие взаимодействие обмоток с постоянным магнитом. Для схемы, показанной на рис. 8.39, поворот двигателя по часовой стрелке обеспечивается путем подачи на обмотки управляющих воздействий (табл. 8.8). Таблица 8.8 Воздействия, требующиеся для поворота шагового двигателя по часовой стрелке
Обмотка А В соответствии с приведенной в табл. 8.8 последовательностью воздействий сначала обмотка А притягивает северный полюс магнита для установки оси двигателя в исходное положение. Затем обмотка В притягивает южный полюс магнита, в результате чего двигатель поворачивается на 90°. В дальнейшем под влиянием аналогичных воздействий двигатель будет вращаться по часовой стрелке (на 90° на каждом шаге). На валу шагового двигателя обычно устанавливается зубчатая передача понижающего типа - так, чтобы на каждом очередном шаге обеспечивался небольшой угловой поворот управляемого устройства (обычно величина этого поворота составляет всего 2°, Рис. 8.39 а не 90°, как в вышеописанном приме- Схема управления шаговым двигателем ре) • Последнее позволяет создавать па  Обмотка В р выходе шагового двигателя значительный крутящий момент и более точно управлять положением выходного вала. УПРАВЛЕНИЕ СЕРВОДВИГАТЕЛЯМИ Серводвигатели обычно используются в радиоуправляемых летательных аппаратах, автомобилях и кораблях и могут весьма просто управляться микроконтроллерами. Подобные двигатели также часто применяются в робототехнических устройствах, которые выполняют простые механические операции. На первый взгляд это может показаться странным, но серводвигатели всегда считались аналоговыми устройствами. Выходной компонент серводвигателя, как правило, выполняется в виде колеса, которое должно поворачиваться в угловом диапазоне от О до 90° (в настоящее время известны серводвигатели, обеспечивающие возможность поворота в угловом диапазоне от О до 180°, а также серводвигатели, создающие весьма значительные по величине выходные крутящие моменты и использующиеся в системах специального назначения). Для типовых схем серводвигателей требуются напряжение питания -5 В, надежное заземление и входной сигнал управления. Не вызывает сомнения тот факт, что радиоуправляемые серводвигатели относятся к группе аналоговых устройств, однако их сигнал управления может формироваться на базе цифровых логических сигналов в виде импульсов с широтно-импульсной модуляцией. Эти импульсы обычно имеют длительность в диапазоне от 1,0 до 2,0 мс с периодом 20 мс (рис. 8.40). 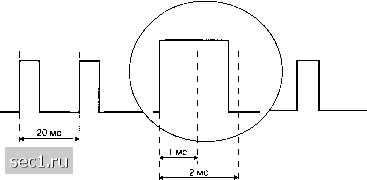 Рис. 8.40 Временная диаграмма ШИМ сигнала для управления серводвигателем 0 ... 87888990919293 ... 159 |